Содержание
как правильно пользоваться роботизированной КПП, ее плюсы и минусы с фото и видео
Современные автомобили оборудуются новыми типами трансмиссий, среди которых роботизированная КПП. Чтобы разобраться в основных моментах, связанных с ее эксплуатацией, нужно понимать, что такое коробка передач робот.
Содержание
- 1 Что собой представляет роботизированная коробка передач?
- 1.1 Устройство роботизированной КПП
- 1.2 Особенности роботизированной КПП
- 2 Принцип работы коробки передач робот
- 2.1 Режимы работы
- 3 Как научится ездить на роботизированной коробке передач? Основные особенности управления
- 3.1 Прогрев роботизированной коробки переключения передач и особенности эксплуатации
- 3.2 Правила правильного старта на коробке робот
- 3.3 Эксплуатация роботизированной коробки передач в городских условиях
- 4 Преимущества
- 5 Недостатки
- 6 Отличие роботизированной коробки передач от автоматической
- 7 Актуальность коробки робот в России
- 8 Советы по выбору роботизированной коробки передач
- 9 Основные неисправности в работе роботов
- 10 Фотогалерея
- 11 Видео «Как не допустить быстрого выхода из строя роботизированной КПП»
[ Раскрыть]
[ Скрыть]
Что собой представляет роботизированная коробка передач?
Роботизированная коробка на автомобиле означает нечто среднее между МКПП и автоматической трансмиссией. Фактически роботизированная КПП представляет собой «механику», оборудованную автоматическим сцеплением и возможностью переключения скоростей. Работа этого типа агрегата зависит не от водителя, а от функционирования управляющего электронного модуля. Во время движения водитель должен только правильно передавать входящие данные для обеспечения правильной работы КПП.
Фактически роботизированная КПП представляет собой «механику», оборудованную автоматическим сцеплением и возможностью переключения скоростей. Работа этого типа агрегата зависит не от водителя, а от функционирования управляющего электронного модуля. Во время движения водитель должен только правильно передавать входящие данные для обеспечения правильной работы КПП.
Перед покупкой авто с таким агрегатом рекомендуется разобраться с основными характеристиками и принципом действия устройства.
Устройство роботизированной КПП
Схематическое устройство конструктивных компонентов РКПП
Чтобы понять, что такое коробка передач робот, надо разобраться в устройстве агрегата. Дополнительные элементы, предназначенные для выжима сцепления, а также переключения и выбора скоростей, называются актуаторами.
Роботизированная трансмиссия оснащается собственной управляющей системой, выполненной в виде блока управления, а также нескольких контроллеров. Эти датчики предназначены для взаимодействия с блоком. Роботизированная КПП принципиально отличается от традиционной автоматической коробки и вариаторных трансмиссий.
Роботизированная КПП принципиально отличается от традиционной автоматической коробки и вариаторных трансмиссий.
Коробки передач робот, как и механические, оснащаются сцеплением. В таких типах агрегатов не применяются трансмиссионные масла ATF.
В зависимости от производителя автомобиля, роботизированная трансмиссия может оснащаться одним либо двумя сцеплениями:
- если сцепление одно, то это однодисковый агрегат;
- если два, то трансмиссия считается преселективной.
Основные компоненты устройства роботизированного агрегата:
- Сама КПП.
- Актуаторы или сервоприводы. Предназначены для выжима сцепления и активации скоростей.
- Управляющий модуль, являющийся микропроцессорным блоком. Используется для обработки и передачи команд.
- Внешние контроллеры. Количество датчиков может отличаться в зависимости от производителя машины.
КПП
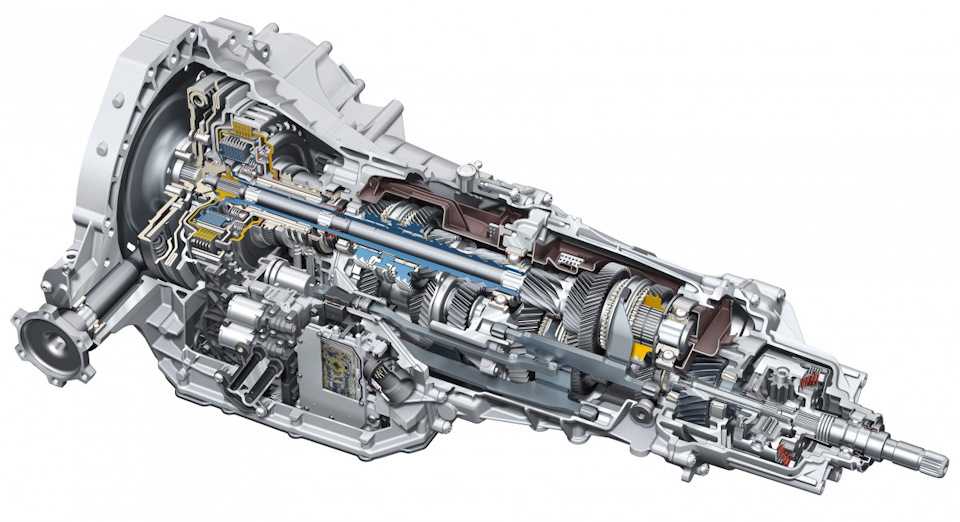
Подробнее с устройством роботизированного агрегата рекомендуем разобраться на примере шестиступенчатой коробки, оснащенной двумя сцеплениями. Агрегат выполнен в виде механической КПП, но оборудуется двумя ведущими шкивами. Один из этих элементов устанавливается внутри другого. Внешний шкив обладает внутренней полостью, в которую устанавливается внутренний компонент. На внешнем шкиве располагаются шестеренки привода второй, четвертой и шестой скоростей, а на внутреннем — шестерни первой, третьей, пятой и задней передачи.
Агрегат выполнен в виде механической КПП, но оборудуется двумя ведущими шкивами. Один из этих элементов устанавливается внутри другого. Внешний шкив обладает внутренней полостью, в которую устанавливается внутренний компонент. На внешнем шкиве располагаются шестеренки привода второй, четвертой и шестой скоростей, а на внутреннем — шестерни первой, третьей, пятой и задней передачи.
Каждый вал роботизированной коробки передач оборудуется отдельным сцеплением.
Актуаторы или сервоприводы
Актуаторные устройства могут быть электрическими либо гидравлическими. Электрический тип элементов выполнен в виде электрического моторчика с редукторным устройством, а гидравлический считается гидроцилиндром. Шток последнего связывается с синхронизаторным устройством. Основное предназначение актуаторных элементов заключается в механическом перемещении синхронизаторных составляющих, а также активации и деактивации сцепления.
Управляющий модуль
Управляющий модуль — микропроцессорный блок, на который установлены внешние контроллеры.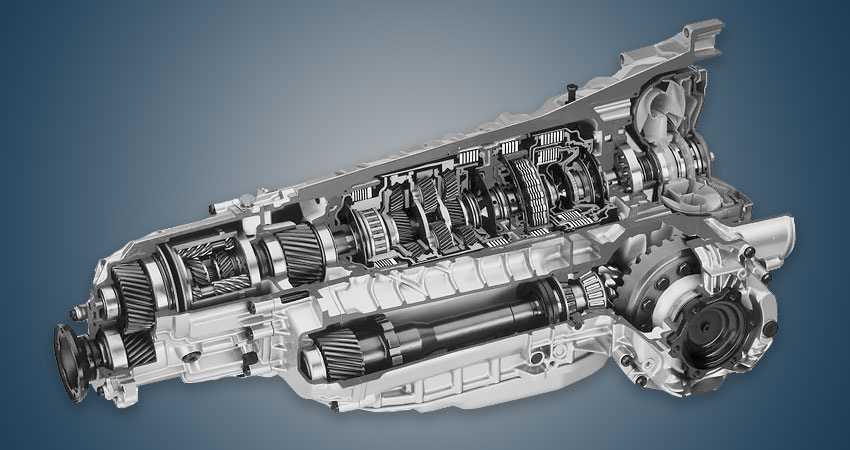 Эти датчики задействованы в электронной системе управления мотором машины. Датчик трансмиссии взаимодействует с контроллерами от силового агрегата и прочих систем, к примеру, ABS. Управляющий модуль может быть совмещен с микропроцессорным блоком управления ДВС, но трансмиссия будет функционировать по своему алгоритму.
Эти датчики задействованы в электронной системе управления мотором машины. Датчик трансмиссии взаимодействует с контроллерами от силового агрегата и прочих систем, к примеру, ABS. Управляющий модуль может быть совмещен с микропроцессорным блоком управления ДВС, но трансмиссия будет функционировать по своему алгоритму.
Канал Carvizor подробно рассказал об устройстве и конструктивных особенностях РКПП.
Особенности роботизированной КПП
Электрический привод сцепления функционирует за счет электромотора, а также механической скорости. Работа гидравлического привода основана на специальных цилиндрических устройствах, управление которыми осуществляется посредством электромагнитного клапана. Иногда роботизированный агрегат может быть дополнен электромотором, использующимся для перемещения цилиндрических элементов и рассчитанного на поддержку функционирования гидромеханического модуля.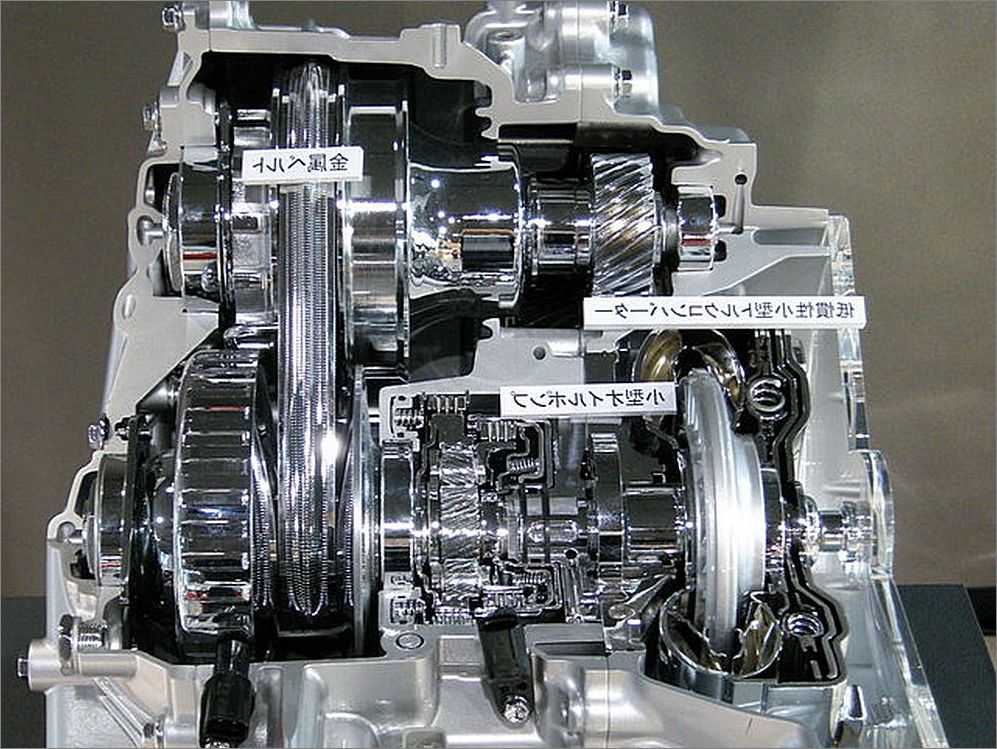 Это устройство, оснащенное приводом, характеризуется долгим переключением скорости, которая может составить до половины секунды.
Это устройство, оснащенное приводом, характеризуется долгим переключением скорости, которая может составить до половины секунды.
Если сравнить с гидравлическим устройством, то для работы агрегата не требуется постоянная поддержка нужного уровня давления. В некоторых моделях Опель гидравлические агрегаты характеризуются быстрым циклом переключения скорости, обеспечивающего переключение за 0,06 сек. Но такие роботы обычно устанавливаются на спорткары.
Принцип работы коробки передач робот
Схема функционирования роботизированного агрегата
Роботизированный агрегат работает наподобие механики — для начала езды и переключения скоростей водителю надо выжимать педаль сцепление. Процедура активации этого механизма выполняется посредством актуаторного устройства, получающего импульс от управляющего модуля. После подачи сигнала узел медленно вращает редукторный узел.
Если трансмиссия оборудована двумя сцеплениями, то изначально производится активация первого. После этого актуаторное устройство выбора и активации скорости подводит синхронизаторный узел к шестеренке первой скорости. Это приводит к ее блокировке на валу и началу вращения вторичного шкива. Когда машина тронулась с места, водитель жмет на газ. Если трансмиссия однодисковая, активация следующей скорости произойдет через определенный временной промежуток. В итоге появляется так называемый провал во времени.
Это приводит к ее блокировке на валу и началу вращения вторичного шкива. Когда машина тронулась с места, водитель жмет на газ. Если трансмиссия однодисковая, активация следующей скорости произойдет через определенный временной промежуток. В итоге появляется так называемый провал во времени.
Для предотвращения появления временной задержки и снижения время переключения передач агрегат оборудуется вторым сцеплением и другим валом. Это привело к созданию преселективной коробки. Во время включения первой скорости вторая готова к активации, поскольку второе сцепление уже задействовано. Когда на агрегат поступает сигнал от управляющего модуля, происходит быстрое переключение с первой скорости на вторую.
Аналогично выполняется последующее переключение на более высокие и низкие скорости во время движения. Временной интервал при переключении минимальный. Любые перегазовки исключаются, также нет провала тяги двигателя и других нюансов. В результате автомобиль едет динамично, а экономия потребления горючего максимальная. Функционирование в режиме автомата достигается благодаря регулярному анализу микропроцессорного модуля импульсов, подающихся с внешних контроллеров.
Функционирование в режиме автомата достигается благодаря регулярному анализу микропроцессорного модуля импульсов, подающихся с внешних контроллеров.
При получении сигналов и их отправке микропроцессор учитывает:
- величину нагрузки на силовой агрегат;
- скорость езды;
- положение, в котором находится педаль газа.
Роботизированные коробки обладают возможностью ручного переключения скоростей, эту особенность можно назвать имитацией гидромеханического автомата. Некоторые типы агрегатов позволяют выполнить блокировку при активации повышенной скорости.
Блок-схема функционирования роботизированной системы I-Shift на автомобилях Хонда
Режимы работы
Микропроцессорный модуль может функционировать в нескольких режимах:
- Спорт. Обычно его активация производится при движении на трассе, когда автомобиль стабильно едет на повышенной скорости.
- Городской режим. Активируется при движении по городу либо стоянии в пробке.
- Эконом.
 Позволяет максимально сэкономить топливо. Но скорость езды будет минимальной.
Позволяет максимально сэкономить топливо. Но скорость езды будет минимальной.
 Позволяет максимально сэкономить топливо. Но скорость езды будет минимальной.
Позволяет максимально сэкономить топливо. Но скорость езды будет минимальной.Как научится ездить на роботизированной коробке передач? Основные особенности управления
Чтобы не допустить появления неисправностей в работе трансмиссии, надо знать, как пользоваться роботом, а именно:
- как выполнять прогрев агрегата;
- как правильно начинать движения;
- как пользоваться трансмиссией при эксплуатации авто в режиме города.
Прогрев роботизированной коробки переключения передач и особенности эксплуатации
Многие производители авто утверждают, что роботизированные агрегаты не нуждаются в прогреве. Но в этом вопросе надо учитывать температуру рабочей жидкости в смазочной системе, а также как масло ведет себя в условиях мороза. Некоторые типы расходных материалов при низких температурах загустевают и собираются в нижней части агрегата. По стандарту процесс прогрева состоит в запуске двигателя и выжидании 2-3 минут. При прогреве автомобиля не нужно трогать рычаг КПП.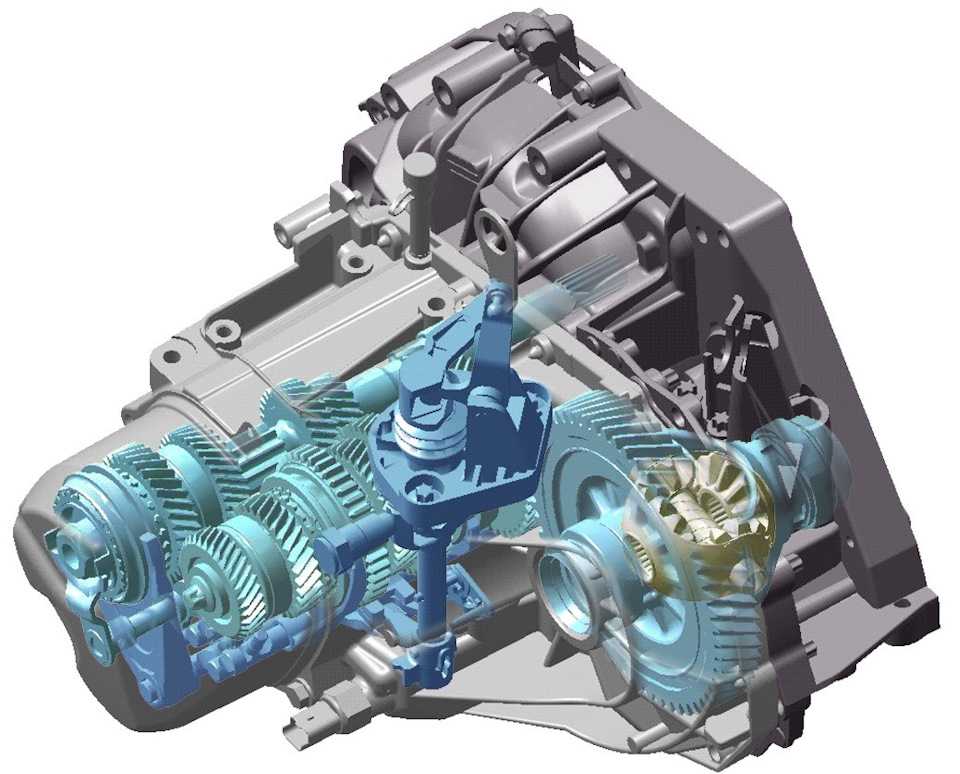
Если автомобиль находится в гараже, то выгонять его нужно спокойно и плавно, чтобы не допустить толчков и рывков. При прогреве надо следить за количеством оборотов, их число в идеале будет минимальным и составит около 1 тысячи в минуту. Выполнять прогрев агрегата следует и летом, благодаря этому все составляющие компоненты робота будут качественно смазаны. Выполнение прогрева позволит не допустить быстрого износа и стирания компонентов агрегата.
Основные особенности эксплуатации, которые позволят увеличить ресурс работы агрегата в целом:
- Нельзя допустить буксования при езде в мороз. Это приведет к быстрому износу исполнительных механизмов и узлов. Регулярное буксование станет причиной разкалибровки агрегата.
- Специалисты не советуют часто ездить по сильно заснеженным поверхностям. Транспортное средство может застрять, что в итоге станет причиной пробуксовок.
- В качестве зимней резины рекомендуется использовать изделия, оснащенные шипами. При установке на колеса обычных шин есть вероятность пробуксови на гололеде.
- При длительных простоях, составляющих несколько дней и более, селектор коробки передач рекомендуется устанавливать в положение Е. Мотор должен быть заглушен.
- Если состояние дороги плаченое, специалисты советуют начинать движение со второй скорости, но при этом сильно не газовать.

Об основных принципах управления роботизированной КПП на примере Лады Гранты рассказал Алексей Рыков.
Правила правильного старта на коробке робот
Владельцам машин, оборудованных роботизированными КПП, надо учитывать, что некоторые транспортные средства не имеют дополнительной опции помощи при старте. В частности, речь идет о начале движения на возвышенности, в гору. Поэтому важно правильно научиться трогаться с места. Процедура троганья выполняется так же, как на машине с механическим агрегатом.
Более подробно о начале езды:
- Рычаг стояночного тормоза должен быть поднят.
- Рычаг коробки передач устанавливается в режим А.
- Водитель легко, без усилий жмет на газ.
- Одновременно с этим отключается рычаг стояночного тормоза.
Если при начале езды на улице минусовая температура и высокая влажность, селектор коробки можно перевести в положение М1. Сила воздействия на педаль газа должна быть допустимой, чтобы не произошла перебуксовка. Если машина оборудована гироскопом, то при выборе автоматического режима микропроцессор агрегата сам выберет необходимую скорость и будет выполнять переключение. Это позволит переключаться скоростям на понижение. Если водитель опытный, то с учетом ситуации он может установить режим М при фиксации установленной передачи.
Если изначально устанавливается скоростной режим, то скорость передвижения не рекомендуется менять. Количество оборотов двигателя должно составить от 2500 до 5000 в минуту, но не за пределами этого диапазона. При начале езды на спуске селектор трансмиссии устанавливается в режим А и отключается рычаг ручного тормоза.![]()
Эксплуатация роботизированной коробки передач в городских условиях
Регулярная эксплуатация автомобиля в режиме города и пробок может привести к быстрому износу компонентов трансмиссии. Для предотвращения этого при остановке машины следует переводить рычаг коробки передач в режим N. Затем производится активация стояночного тормоза и остановка мотора. Если остановки кратковременные, к примеру, в условиях пробок, то режим нейтрали можно не включать, достаточно остановиться, когда рычаг установлен в режим А. Если автомобиль простоит в пробке больше одной минуты, то двигатель надо будет остановить.
О тонкостях использования машин с установленным роботом рассказал Василий Костин.
Преимущества
Плюсы роботизированных агрегатов:
- Надежность конструкции агрегата в целом. В основе устройства лежит механическая составляющая, которая прошла многочисленные испытания и изучена специалистами. Благодаря этому по надежности данный тип КПП лучше, чем обычные автоматы и вариаторы.
- Эксплуатация автомобиля с установленным роботизированным агрегатом позволяет сэкономить горючее. Если коробка и двигатель машины не изношены, то экономия горючего может быть до 30%.
- Для заправки в роботизированный агрегат требуется меньше смазочной жидкости, в среднем это не более трех литров. Для сравнения — в вариаторные коробки заливается около семи литров. Такое преимущество позволяет сэкономить финансовые средства.
- Количество передач в роботах соответствует числу скоростей на механике.
- Благодаря тому, что основу КПП составляет механическая часть, это позволяет выполнить простой ремонт. Навыками подобного ремонта владеют многие специалисты, чего не скажешь о вариаторных агрегатах. Большинство распространенных неисправностей можно решить самостоятельно при правильном подходе.
- Срок службы системы сцепления больше, чем на механических КПП, примерно на 40%. Речь идет не только об экономии финансовых средств, но и о безопасности.
- При эксплуатации авто в городских условиях начать движение без нагрузки на агрегат позволяет функция переключения скоростей в ручном режиме.
 Благодаря этому по надежности данный тип КПП лучше, чем обычные автоматы и вариаторы.
Благодаря этому по надежности данный тип КПП лучше, чем обычные автоматы и вариаторы.
Недостатки
Роботизированные КПП имеют не только плюсы, но и минусы, они приведены в соответствии с отзывами владельцем машин с РКПП:
- Основной минус в РКПП заключается в проблемах при программировании трансмиссии. Автовладельцу может быть затруднительно перепрограммировать программное обеспечение, чтобы повысить динамику машины и сэкономить ресурсы агрегата. Поэтому возникают сложности с настройкой трансмиссии под определенный стиль езды. Водителю потребуется время, чтобы привыкнуть к манере функционирования авто для удобной эксплуатации.
- Низкая скорость активации скоростей и замедленная реакция агрегата. Это обусловлено издержками в программировании устройства. Данная проблема характерна и для многих автоматических КПП.
- При езде в условиях города и пробок, а также по неровным дорогам водителю следует переходить на ручной режим управления. В противном случае элементы системы сцепления изнашиваются быстрее. Это отражается и на ресурсе эксплуатации агрегата в целом.
- Во время переключения скоростей ощущаются рывки и толчки. Не на всех агрегатах, но на многих. Это связано с тем, что газ не сбрасывается перед тем, как произойдет переключение скорости. Для ликвидации данной проблемы можно не выжимать полностью педаль газа.
- При движении в гору может разомкнуться сцепление. Проблема связана с перегревом трансмиссионного агрегата. Если автомобиль движется на подъем, рекомендуется переходить на ручное управление.
 В противном случае элементы системы сцепления изнашиваются быстрее. Это отражается и на ресурсе эксплуатации агрегата в целом.
В противном случае элементы системы сцепления изнашиваются быстрее. Это отражается и на ресурсе эксплуатации агрегата в целом.Решить проблему с перепрограммированием можно путем замены прошивки микропроцессора, но это надо делать, когда закончится срок гарантийного обслуживания.
Каналом HPC представлен реальный негативный отзыв потребителя о работе роботизированного узла на авто.
Отличие роботизированной коробки передач от автоматической
Основные отличия роботизированных трансмиссий от автоматических агрегатов:
- Конструктивные особенности. Робот представляет собой механический агрегат, оборудованный управляющим микропроцессорным устройством. Автоматические КПП имеют свое устройство. В него также входит электронный модуль, но механической составляющей в автоматах нет.
- Автоматические трансмиссии выигрывают у роботизированных агрегатов в плане быстроты переключения скоростей. Также на автоматах процедура переключения выполняется более плавно.
- Роботизированные устройства обладают опцией ручного переключения. На автоматических агрегатах возможности ручного управления нет.
- Автомобили, оборудованные роботизированным агрегатом, потребляют меньше горючего. Для их заправки требуется меньше смазочной жидкости.
- Процедура ремонта и обслуживания коробок передач робот обойдется потребителю дешевле, нежели АКПП.
 Робот представляет собой механический агрегат, оборудованный управляющим микропроцессорным устройством. Автоматические КПП имеют свое устройство. В него также входит электронный модуль, но механической составляющей в автоматах нет.
Робот представляет собой механический агрегат, оборудованный управляющим микропроцессорным устройством. Автоматические КПП имеют свое устройство. В него также входит электронный модуль, но механической составляющей в автоматах нет.Актуальность коробки робот в России
Российские производители автомобилей почти не устанавливают роботизированные агрегаты на свои продукты. В 2015 году руководство автоконцерна ВАЗ заявило, что модели машин Лада Приора будут оснащаться роботизированными КПП. Общий вес устройства составляет примерно 35 кг. Сам агрегат адаптирован под отечественные дороги, а также погодные условия, характерные для климата России.
Общий вес устройства составляет примерно 35 кг. Сам агрегат адаптирован под отечественные дороги, а также погодные условия, характерные для климата России.
К примеру, автоматы могут отказать в запуске мотора авто, если температура упадет ниже -25 градусов. Роботизированные агрегаты смогут эффективно функционировать и заводить ДВС при -40 градусах. Производитель АвтоВАЗ дает гарантию на три года на КПП, но утверждает, что в среднем срок службы устройства составит около десяти лет. Такой шаг был сделан представительством концерна для увеличения продаж автомобилей Лада Приора.
Сегодня из отечественных автомобилей роботизированные КПП устанавливаются только на Лады Гранты и Приоры.
Официальный канал Лада представил сюжетный ролик о производстве роботизированных агрегатов для автомобилей Лада Гранта.
Советы по выбору роботизированной коробки передач
Перед покупкой транспортного средства с РКПП надо собрать максимум информации о функционировании конкретного типа трансмиссии. Рекомендуется изучить отзывы потребителей, поскольку отдельные варианты роботов обладают «глюками», характерными для всей линейки. В частности, надо узнать о временном интервале при переключении передач. Лучше отдать предпочтение вариантам, в которых процедура переключения выполняется максимально быстро.
Рекомендуется изучить отзывы потребителей, поскольку отдельные варианты роботов обладают «глюками», характерными для всей линейки. В частности, надо узнать о временном интервале при переключении передач. Лучше отдать предпочтение вариантам, в которых процедура переключения выполняется максимально быстро.
Выбирая авто, надо учесть и параметр индивидуальности устройства. Одинаковые трансмиссии могут различаться между собой. Проблемы, связанные с работой агрегата, часто можно удалить посредством перепрошивки микропроцессорного блока.
Основные неисправности в работе роботов
Симптомы, которые могут сообщить о неполадках в работе устройства:
- На контрольном щитке появился сигнализационный индикатор. Это может быть лампочка Чек Энджин или специальный символ, сообщающий о проблемах в работе коробки передач.
- При езде водитель слышит посторонние звуки. О неполадках в работе трансмиссии могут сообщить нехарактерный вой или жужжание.
- Отсутствует реакция при нажатии на газ. Обороты двигателя не увеличиваются либо увеличиваются, а скорость движения не растет.
- Появление масляной лужи под автомобилем. Это свидетельствует об утечке расходной жидкости из агрегата.
- Происходит буксовка системы сцепления.
- Когда водитель жмет на газ и делает это плавно либо при переключении скоростей, появляется толчок или рывок.
- Трансмиссионный узел сам по себе прекращает функционировать, автомобиль останавливается и не двигается.
 Обороты двигателя не увеличиваются либо увеличиваются, а скорость движения не растет.
Обороты двигателя не увеличиваются либо увеличиваются, а скорость движения не растет.Большая часть неполадок обусловлена некорректной работой микропроцессорного устройства. Если говорить о механических проблемах, то большая часть из них связана с износом составляющих элементов. Такие детали обычно ремонту не подлежат и меняются.
Механические неполадки:
- износ вилки, предназначенной для выбора скорости;
- подшипниковые устройства качения изнашиваются, из-за этого может наблюдаться гул.
Фотогалерея
Фото роботов от разных автопроизводителей приведены в этом разделе.![]()
Роботизированный узел Speedshift от производителя Мерседес Коробка передач робот SMG от концерна БМВ Роботизированный узел Durashift EST от производителя Форд
Видео «Как не допустить быстрого выхода из строя роботизированной КПП»
Пользователь JoRick Revazov рассказал о вещах, которые нельзя делать с роботизированным узлом на автомобиле.
Загрузка …
Роботизированная коробка передач – устройство, принцип работы
Роботизированная коробка передач (обиходное название – коробка-робот) представляет собой механическую коробку передач, в которой функции выключения сцепления и переключения передач автоматизированы. Название «роботизированная коробка передач» свидетельствует о том, что водитель и условия движения формируют только входную информацию для системы управления, а работой коробки передач руководит электронный блок с определенным алгоритмом управления.
Роботизированная коробка передач сочетает в себе комфорт автоматической коробки передач, надежность и топливную экономичность механической коробки передач. При этом «робот» в большинстве своем значительно дешевле классической АКПП. В настоящее время практически все ведущие автопроизводители оснащают свои автомобили роботизированными коробками передач, устанавливая их на всю линейку моделей от малого до премиум класса.
Устройство роботизированной коробки передач
Роботизированные коробки передач различаются по конструкции, вместе с тем, можно выделить следующее общее устройство данного агрегата — механическая коробка передач с системой управления сцеплением и передачами.
В автоматизированных коробках передач используется сцепление фрикционного типа. Это может быть отдельный диск или пакет фрикционных дисков. Прогрессивным в конструкции коробки передач является т.н. двойное сцепление, которое обеспечивает передачу крутящего момента без разрыва потока мощности.
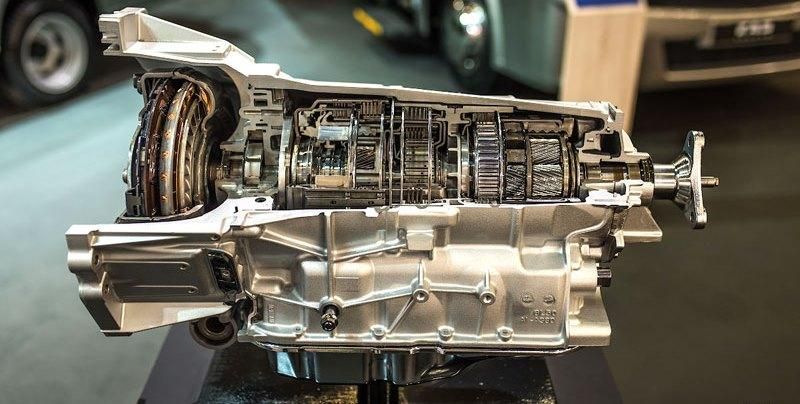
В основу конструкции роботизированной коробки положена механическая коробка передач. При производстве используются, в основном, готовые технические решения. Например, автоматизированная коробка передач Speedshift от Mercedes-Benz построена на базе АКПП 7G-Tronic путем замены гидротрансформатора на фрикционное многодисковое сцепление. В основе коробки SMG от BMW лежит шестиступенчатая «механика», оборудованная электрогидравлическим приводом сцепления.
Коробки-роботы могут иметь электрический или гидравлический привод сцепления и передач. В электрическом приводе исполнительными органами являются сервомеханизмы (электродвигатель и механическая передача). Гидравлический привод осуществляется с помощью гидроцилиндров, которые управляются электромагнитными клапанами. Такой вид привода еще называют электрогидравлическим. В ряде конструкций «роботов» с электрическим приводом (Easytronic от Opel, Durashift EST от Ford) используется гидромеханический блок с электродвигателем для перемещения главного цилиндра привода сцепления.
Электрический привод отличает невысокая скорость работы (время переключения передач 0,3-0,5с) и меньшее энергопотребление. Гидравлический привод предполагает постоянное поддержание давления в системе, а значит большие затраты энергии. Но с другой стороны он более быстрый. Некоторые роботизированные коробки передач с гидравлическим приводом, устанавливаемые на спортивные автомобили, имеют просто впечатляющую скорость переключения передач: Ferrari 599GTO — 0,06c, Lamboghini Aventador – 0,05c.
Эти качества определяют область применения «роботов» с электрическим приводом на бюджетных автомобилях, с гидравлическим приводом – на более дорогих автомобилях.
Электрический привод имеют следующие конструкции коробок передач:
- Allshift от Mitsubishi;
- Dualogic от Fiat;
- Durashift EST от Ford;
- Easytronic от Opel;
- MultiMode от Toyota;
- SensoDrive от Citroen;
- 2-Tronic от Peugeot.
Достаточно большое количество роботизированных коробок оснащены гидравлическим приводом:
- ISR (Independent Shifting Rods) от Lamborghini;
- Quickshift от Renault;
- R-Tronic от Audi;
- Selespeed от Alfa Romeo;
- SMG от BMW.
Управление роботизированной коробкой передач осуществляет электронная система, которая включает входные датчики, электронный блок управления и
исполнительные механизмы. Входные датчики отслеживают основные параметры коробки передач: частоту вращения на входе и выходе, положение вилок включения передач, положение селектора, а также давление и температуру масла (для гидравлического привода) и передают их в блок управления.
На основании сигналов датчиков электронный блок управления формирует управляющие воздействия на исполнительные механизмы в соответствии с заложенной программой. В своей работе электронный блок взаимодействует с системой управления двигателем, системой ABS (ESP). В роботизированных коробках с гидравлическим приводом в систему управления дополнительно включен гидравлический блок управления, который обеспечивает непосредственное управление гидроцилиндрами и давлением в системе.
Исполнительными механизмами роботизированной коробки передач в зависимости от вида привода являются электродвигатели (электрический привод), электромагнитные клапаны гидроцилиндров (гидравлический привод).
Коробка передач с двойным сцеплением
Основным недостатком роботизированной коробки передач является сравнительно большое время переключения передач, что приводит к рывкам и провалам в динамике автомобиля и, соответственно, снижает комфорт от управления транспортным средством. Решение указанной проблемы было найдено в применении коробки передач с двумя сцеплениями, обеспечившей переключение передач без разрыва потока мощности.
Двойное сцепление позволяет при включенной передаче выбрать следующую передачу и при необходимости включить ее без перерыва в работе коробки. Поэтому другое название роботизированной коробки передач с двумя сцеплениями — преселективная коробка передач (от preselect — предварительно выбрать).
Поэтому другое название роботизированной коробки передач с двумя сцеплениями — преселективная коробка передач (от preselect — предварительно выбрать).
Другим преимуществом коробки передач с двойным сцеплением является высокая скорость переключение передач, зависящая только от скорости переключения муфт (DSG от Volkswagen — 0,2c, DCT M Drivelogic от BMW – 0,1c). «Робот» с двумя сцепления отличает еще и компактность, что актуально для малолитражных автомобилей. Наряду с этим, можно отметить повышенное энергопотребление коробки (особенно с «мокрым» сцеплением). Сравнительно высокая скорость переключения передач в совокупности с непрерывной передачей крутящего момента позволяют добиться отменной разгонной динамики автомобиля и экономии топлива.
В настоящее время двойное сцепление применяется во многих роботизированных коробках передач:
- DCT M Drivelogic от BMW;
- DSG от Volkswagen;
- PDK от Porsche;
- Powershift от Ford, Volvo;
- Speedshift DCT от Mercedes-Benz;
- S-Tronic от Audi;
- TCT от Alfa Romeo;
- Twin Clutch SST от Mitsubishi.
Даже великолепная Ferrari 458 Italia оборудована Doppelkupplungsgetriebe (коробка передач с двойным сцеплением). Все перечисленные роботизированные коробки передач используют гидравлический привод сцепления и передач. И лишь одна коробка передач на сегодняшний день имеет электрический привод устройств, это EDC (Efficient Dual Clutch) от Renault (время переключения передач 0,29с).
Пионерами массового применения коробки передач с двумя сцеплениями являются Volkswagen и Audi, которые устанавливают роботизированную коробку передач DSG и S-Tronic на свои автомобили с 2003 года. Коробка S-Tronic является аналогом коробки DSG, но в отличие от нее устанавливается продольно оси на задне- и полноприводные автомобили.
На автоматизированной коробке DCT M Drivelogic в системе управления реализуется функция Drivelogic, которая предполагает одиннадцать программ переключения передач. Шесть программ выполняются в режиме ручного переключения, а пять являются автоматизированными программами переключения передач. Данная функция позволяет адаптировать смену передач под стиль вождения конкретного человека. По сути, данная коробка является адаптивной коробкой передач.
Шесть программ выполняются в режиме ручного переключения, а пять являются автоматизированными программами переключения передач. Данная функция позволяет адаптировать смену передач под стиль вождения конкретного человека. По сути, данная коробка является адаптивной коробкой передач.
Принцип действия роботизированной коробки передач
Работа роботизированной коробки передач может осуществляться в двух режимах: автоматическом и полуавтоматическом. В автоматическом режиме электронный блок управления на основании сигналов входных датчиков реализует определенный алгоритм управления коробкой с помощью исполнительных механизмов.
На всех роботизированных коробках предусмотрен режим ручного (полуавтоматического) переключения передач, аналогичный функции Tiptronic АКПП. Работа в данном режиме позволяет последовательно переключать передачи с низшей на высшую и наоборот с помощью рычага селектора и (или) подрулевых переключателей. Поэтому в ряде источников информации роботизированная трансмиссия называется секвентальной коробкой передач (от sequensum – последовательность).
Роботы берут на себя сложные задачи по передаче и распределению
Скачать статью в формате PDF
Поделиться этой статьей:
Автор: Брент Баркер срок принудительных работ, работа . Сделанные из «химического теста», его роботы исчезли в анналах научной фантастики. Но этот термин прижился и вошел в английский язык в 1923 году.
Сегодняшние роботы — это что угодно, только не химическое тесто, и они специализируются на выполнении задач, слишком опасных, громоздких, удаленных или сложных для человека. Они варьируются от больших многоруких роботов, используемых при сборке автомобилей, до роботов для обезвреживания бомб, используемых полицией и военными, до нанороботов, используемых в медицине для доставки лекарств через кровоток.
На протяжении более двух десятилетий в электроэнергетике исследуется потенциал роботов для выполнения критических задач. В области передачи и распределения EPRI исследовал роботов, способных:
- Скольжение по проводам экрана для осмотра воздушных линий электропередачи
- Маневр внутри подземных хранилищ для осмотра электрических кабелей
- Забраться на подвесные фарфоровые, стеклянные и полимерные изоляторы и осмотреть их
- Осмотреть компоненты подстанции и защитить их от злоумышленников
- Проплывите через масло внутри больших трансформаторов, чтобы осмотреть сердечник
Роботы для линий электропередач
Воздушные линии электропередачи относятся к числу наиболее широко рассредоточенных активов электроэнергетических компаний.![]() В одних только Соединенных Штатах они преодолевают десятки тысяч миль, многие из них в отдаленных районах. Осмотр необходим один или два раза в год для оценки старения компонентов и наличия полосы отчуждения. Исторически сложилось так, что бригады проводят визуальный осмотр или используют камеры и другие инструменты, когда они проходят по полосе отчуждения, взбираются на сооружения или путешествуют на вертолетах. Несмотря на то, что эта работа имеет решающее значение для надежности системы, она требует много времени, средств и иногда опасна.
В одних только Соединенных Штатах они преодолевают десятки тысяч миль, многие из них в отдаленных районах. Осмотр необходим один или два раза в год для оценки старения компонентов и наличия полосы отчуждения. Исторически сложилось так, что бригады проводят визуальный осмотр или используют камеры и другие инструменты, когда они проходят по полосе отчуждения, взбираются на сооружения или путешествуют на вертолетах. Несмотря на то, что эта работа имеет решающее значение для надежности системы, она требует много времени, средств и иногда опасна.
После почти двух десятилетий исследований и испытаний EPRI разработала автономного робота для проверки линий электропередачи под названием «Ti». Он скользит по экранирующему проводу над проводниками под напряжением, преодолевая в среднем 3 мили в день. Системы обхода помогают Ти обходить препятствия и опоры ЛЭП.
«Мы развертываем Ti в Огайо на 75-мильном сегменте 138-киловольтной линии электропередачи, эксплуатируемой American Electric Power», — сказал Эндрю Филлипс, вице-президент EPRI по инфраструктуре передачи и распределения. «Когда он будет запущен и запущен в начале 2019 года, это будет первый в мире полностью автономный робот для линий электропередач. Он черпает энергию из электромагнитных полей линии электропередачи в ключевых точках для зарядки своих аккумуляторов, скользит вдоль линии, делая фотографии и различные показания, и отправляет их в режиме реального времени рабочим. Он может завершить 75-мильную линию за пять недель».
«Когда он будет запущен и запущен в начале 2019 года, это будет первый в мире полностью автономный робот для линий электропередач. Он черпает энергию из электромагнитных полей линии электропередачи в ключевых точках для зарядки своих аккумуляторов, скользит вдоль линии, делая фотографии и различные показания, и отправляет их в режиме реального времени рабочим. Он может завершить 75-мильную линию за пять недель».
Визуальные и инфракрасные камеры высокого разрешения Ti проверяют полосы отчуждения и компоненты, а также определяют расстояние между линиями электропередач и деревьями. Его детекторы электромагнитных помех могут обнаруживать разряды, такие как искрение. Другие инструменты, запланированные для будущего развертывания: датчики молний, датчики вибрации для ветреных районов и датчики тока утечки для прибрежных районов, где соль может загрязнить компоненты. Если требуется скорость, например, чтобы точно определить источник недавнего отключения, Ti может двигаться со скоростью до 5 миль в час.
«Мы работаем над конфигурацией, похожей на железнодорожную развязку, которая позволит роботу перемещаться на другую линию электропередачи, когда он проходит через подстанцию», — сказал Филлипс. «Это значительно повысит его полезность и ценность».
EPRI изучает затраты и преимущества Ti, такие как повышение безопасности и качества данных. Делая паузу в одном месте, робот может делать снимки лучшего качества, чем снимки, сделанные с вертолета, летящего со скоростью от 30 до 60 миль в час. «Ti может устранить необходимость в подробных проверках вертолетов, снижая риск», — сказал Филлипс.
Роботы-изоляторы передачи
Исследования роботов-изоляторов обусловлены необходимостью снижения рисков безопасности, связанных с дефектами полимерных изоляторов, длина которых составляет от 3 до 15 футов в зависимости от напряжения линии электропередачи. «Сегодня полимеры являются преобладающим изоляционным материалом, и проблема в том, что вы не можете увидеть внутренний дефект, влияющий на электрические характеристики. Вам нужен электрический тестер, который имеет прямой контакт с изолятором», — сказала старший менеджер проекта EPRI Эрика Уиллис.
Вам нужен электрический тестер, который имеет прямой контакт с изолятором», — сказала старший менеджер проекта EPRI Эрика Уиллис.
Компания EPRI разработала и выпустила на рынок инструмент Live-Line для работы с некерамическим изолятором, который может выявлять токопроводящие дефекты. Однако рабочие должны вручную применять инструмент с помощью горячей палки. Держать 10-футовую горячую палку из стекловолокна, которая раскачивается под весом инструмента на конце, может быть тяжелым испытанием для тела, особенно если рабочий находится высоко в ковшовом грузовике, потрепанном ветром.
«Концепция EPRI представляет собой робота, интегрированного с инструментом Live-Line для работы с некерамическим изолятором. Он ползет вверх по изолятору, собирает показания с помощью инструмента, затем ползет вниз, где вы вытаскиваете инструмент и получаете свои результаты. Он говорит вам, приемлема ли единица», — сказал Уиллис.
Когда EPRI провела лабораторные испытания робота с 10 различными конфигурациями изоляторов, измерения робота оказались более последовательными, чем измерения вручную. «Но необходимо проделать большую работу, прежде чем робота можно будет с уверенностью применять в полевых условиях для всех конструкций изоляторов», — сказал Уиллис.
«Но необходимо проделать большую работу, прежде чем робота можно будет с уверенностью применять в полевых условиях для всех конструкций изоляторов», — сказал Уиллис.
EPRI работает с Юго-западным исследовательским институтом над адаптацией этого робота для работы с фарфоровыми изоляторами. Другие улучшения, находящиеся в стадии разработки, включают удлинение рук и кистей, увеличение длины робота и включение усовершенствованных датчиков для улучшения качества данных и скорости обработки. «Мы можем упаковать гораздо больше в маленького робота и поставить камеры на каждую руку», — сказал Уиллис.
Подземные кабельные роботы
Поскольку большинство частей подземных кабельных систем находятся под землей, визуальные осмотры проводятся в отдельных точках: внутри подземных хранилищ, известных как смотровые люки , на подстанциях или сооружениях на стыках с воздушными линиями. Люки являются уязвимыми местами, требующими регулярных осмотров для оценки состояния кабелей, кабельных сращиваний, соединений, опор и другого оборудования.
Ограниченное пространство внутри люков затрудняет тщательный осмотр. Чтобы не посылать инспекторов в люк, некоторые коммунальные службы будут маневрировать камерой с источником света с поверхности.
EPRI анализирует роботизированные методы осмотра подземных кабелей электропередач для повышения безопасности рабочих и сокращения простоев. «Мы изучаем коммерчески доступные системы, их ограничения и то, как их можно адаптировать для использования подземных кабелей», — сказал инженер и ученый EPRI Дэвид Куммер. Проблемы включают четкость изображения, навигацию, возможность извлечения робота и мощность сигнала внутри люка.
«Мы оцениваем дроны для осмотра соединений и других компонентов в люках», — сказал Куммер. «Мы завершили тест, чтобы определить возможности визуализации и понять проблемы при маневрировании в люке. Затем мы протестируем имеющиеся в продаже беспилотники, предназначенные для работы в ограниченном пространстве». Команда Куммера использует транспортный контейнер для создания имитации люка для тестирования этих систем.
EPRI исследует системы, в которых трехфазные кабели находятся внутри стальной трубы и находятся под давлением масла. «Мы оцениваем робота, который может перемещаться внутри трубы и через нефть для осмотра кабеля», — сказал Куммер. Некоторые производители выпускают роботов, предназначенных для осмотра газовых или водопроводных линий, что ставит вопрос о том, могут ли они эффективно перемещаться по нефти и по трубе с кабелем.
На объекте EPRI в Шарлотте Куммер и его команда построили прототип робота и макеты труб с неисправными кабелями. «Робот имеет размеры 2 дюйма в высоту, 11 дюймов в длину и 4 дюйма в ширину, несет две камеры, светодиодные фонари и использует магнитные колеса, чтобы удерживать себя внутри трубы, чтобы он не касался кабеля», — сказал он. «В нашей лаборатории мы вручную протащили робота через 20-футовые участки трубы с помощью макетов кабелей, чтобы оценить ограничения изображения. Мы выявили многие, но не все дефекты, заложенные в кабеле», — сказал Куммер.
EPRI продолжает оценивать эти и другие технологии, включая подводных роботов.
Роботы для обеспечения безопасности подстанции
Поскольку безопасность подстанции по-прежнему в значительной степени зависит от ворот, охраны, освещения и детекторов движения для предотвращения краж, вандализма и терроризма, EPRI оценивает использование роботизированных технологий для повышения безопасности.
«Сегодня в продаже есть как минимум полдюжины автономных роботов. EPRI работает с коммунальными предприятиями над лабораторными и полевыми испытаниями на действующих подстанциях. Лишь немногие пригодны для непрерывной круглосуточной работы 365 дней в году на открытом воздухе, надежно работая морозными зимами и жарким летом в таких разных местах, как Калифорния, Техас, Миннесота и Нью-Йорк», — сказал EPRI Senior. Менеджер программы Кевин Берент.
Местность так же важна, как и погода. По словам Берента, «мы ищем грубых и выносливых роботов; может передвигаться по крупному гравию, грязи, снегу и грязи; и может преодолевать труднопроходимую местность с минимальным обслуживанием».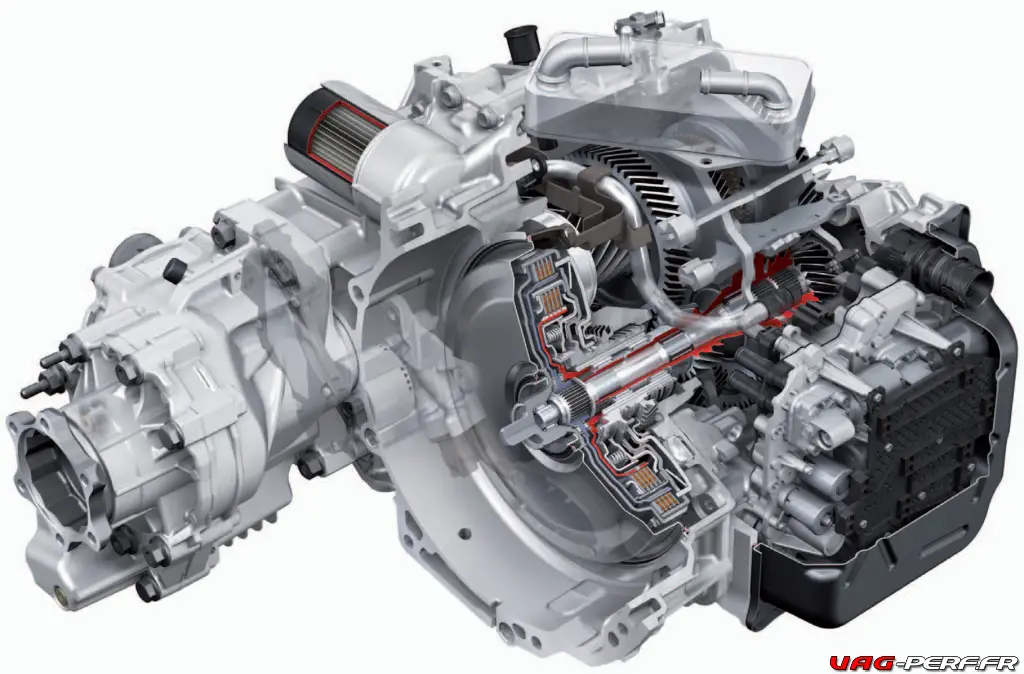
Техническое обслуживание, особенно в удаленных районах без персонала, может быть затруднено. «У многих роботов есть батареи, которые необходимо заменить. Некоторые аккумуляторы можно перезаряжать, но в моделях, которые мы видели, надежной технологии зарядки пока нет», — сказал Берент.
Мобильность и размер помогут отпугнуть злоумышленников. «Исследования показывают, что что-то движущееся вокруг и такое большое, как газонокосилка, может иметь сдерживающий эффект, снижая уровень преступности. Это не может быть похоже на игрушку. Если робот может напрямую атаковать злоумышленника в режиме реального времени с помощью микрофона, динамика, видеокамер и мигающих огней — тем лучше», — сказал Берент.
Многоцелевые роботы могут улучшить экономическое обоснование безопасности подстанции. «Робот-охранник, использующий инфракрасную камеру для обнаружения проникновения в ночное время, может использовать ту же камеру для проверки того, не перегревается ли оборудование больше, чем должно быть», — сказал Берент.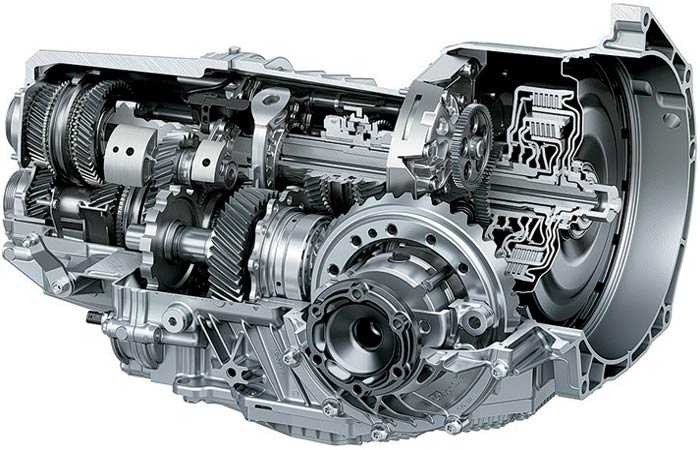 «Мы рассматриваем несколько вариантов. Можно ли использовать робота для обслуживания? Можем ли мы добавить датчики для обнаружения утечек гексафторида серы?»
«Мы рассматриваем несколько вариантов. Можно ли использовать робота для обслуживания? Можем ли мы добавить датчики для обнаружения утечек гексафторида серы?»
Роботы для осмотра подстанции
Роботы потенциально полезны для осмотра подстанции, включая визуальный осмотр и сенсорный мониторинг состояния оборудования, например, температуры, наличия коронных разрядов, утечек масла и гексафторида серы. В 2019 году главный технический руководитель EPRI Пурви Патель определит области применения и преимущества, а также рассмотрит коммерчески доступные технологии.
«После определения перспективных технологий мы планируем провести лабораторные демонстрации на нашей новой 138-киловольтной испытательной подстанции, а затем демонстрации в полевых условиях», — сказал старший технический руководитель EPRI Люк Ван дер Зел. «Цель состоит в том, чтобы оценить полезную нагрузку датчиков и производительность робота». Следующим шагом является разработка технической спецификации и руководства по применению коммунальных услуг.
Роботы-трансформеры
Роботы подстанции также могут использоваться для осмотра внутренних частей больших трансформаторов. Сегодняшние проверки имеют существенные недостатки. «Один из подходов предполагает опускание камеры или эндоскопа внутрь трансформатора, но диапазон доступа ограничен», — сказал Патель.
Второй подход — слить трансформаторное масло — десятки тысяч галлонов — и отправить человека внутрь. После осмотра масло заменяется. «Это требует много времени, потому что включает в себя вход в замкнутое пространство и переработку масла», — сказал Патель.
EPRI провела оценку различных имеющихся в продаже роботов для осмотра трансформаторов, определила и протестировала в лаборатории многообещающие варианты, а затем провела полевые испытания тех, у которых есть утилиты. Под руководством операторов, находящихся снаружи трансформатора, роботы плывут по трансформаторному маслу, собирая видео и фото внутри. Это устраняет необходимость в том, чтобы кто-то входил в трансформатор.
Контролируемые, воспроизводимые лабораторные исследования EPRI позволили получить представление о маневренности роботов, качестве изображения и видео, а также о способности достигать различных частей трансформатора.
Ключевые технические эксперты EPRI:
Эндрю Филлипс, Эрика Уиллис, Дэвид Куммер, Кевин Берент, Люк Ван дер Зел, Пурви Патель, Дрю Макгуайр
Для получения дополнительной информации обращайтесь по адресу [email protected].
Дополнительные ресурсы:
- Оценка новых технологий проверки роботов-трансформеров
Работа Крейга Дисковски/Edge Design
Гибридная гидростатическая трансмиссия делает роботов грациозными и точными, как человек
Предоставлено: Исследование Диснея.
Новый тип гидростатической трансмиссии, сочетающий в себе гидравлические и пневматические линии, может безопасно и точно управлять манипуляторами роботов, обеспечивая им деликатность, необходимую для захвата яйца, не разбивая его.
Эта трансмиссия практически не имеет трения и люфта, обеспечивая исключительную точность при выполнении таких задач, как заправка нити в швейную иглу.
Гибридная трансмиссия позволяет вдвое сократить количество громоздких гидравлических линий, которые потребовались бы для полностью гидравлической системы. Таким образом, роботизированные конечности можно сделать легче и меньше, сказал Джон П. Уитни, доцент кафедры машиностроения и промышленной инженерии в Северо-восточном университете, который руководил разработкой трансмиссии, будучи младшим научным сотрудником Disney Research.
Уитни и ее коллеги из Disney Research, Католического университета Америки и Университета Карнеги-Меллона расскажут о новой трансмиссии и роботе-гуманоиде, который они создали с ее помощью, на конференции IEEE по робототехнике и автоматизации, ICRA 2016, 17 мая в Стокгольм, Швеция.
«Передача обеспечивает нашему роботу невероятно плавное и быстрое движение, а также позволяет реалистично взаимодействовать с людьми и обращаться с хрупкими объектами», — сказала соавтор Джессика Ходжинс, вице-президент Disney Research и профессор робототехники в Университет Карнеги-Меллона.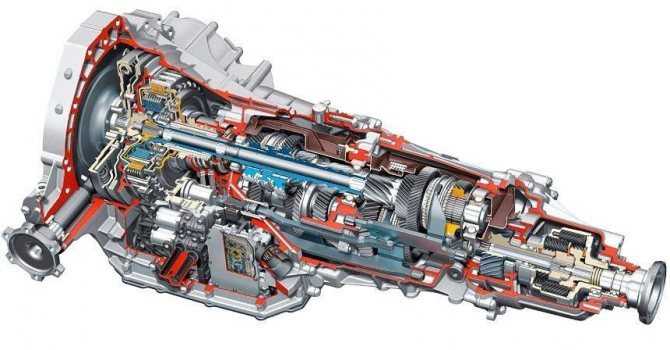 «На данный момент роботом дистанционно управляет человек-оператор, но мы ожидаем такого же уровня механических характеристик, как только движения будут автоматизированы».
«На данный момент роботом дистанционно управляет человек-оператор, но мы ожидаем такого же уровня механических характеристик, как только движения будут автоматизированы».
Уитни сказала, что роботизированное соединение обычно имеет два гидравлических цилиндра, уравновешенных друг против друга. Но в этой последней конструкции исследователи соединили каждый цилиндр, заполненный водой, с цилиндром, наполненным воздухом. Пневматический цилиндр служит в качестве пневматической пружины постоянной силы, обеспечивая необходимое усилие предварительного натяжения, позволяя шарниру двигаться в обоих направлениях с вдвое меньшим количеством громоздких гидравлических линий.
Исследователи использовали новую трансмиссию для создания простого робота-гуманоида с двумя руками, со стереокамерами, установленными в голове, передающими видеосигнал оператору с надетым на голову дисплеем. Руки соединены с идентичной контрольной фигурой, спрятанной за стеной, чтобы можно было использовать робота для исследования взаимодействия человека и робота.
Руки соединены с идентичной контрольной фигурой, спрятанной за стеной, чтобы можно было использовать робота для исследования взаимодействия человека и робота.
«Эта технология позволила нам создать легкие, быстрые и ловкие роботы-манипуляторы», — сказал Уитни. «У них невероятно реалистичная природа, предлагающая сочетание небольшой массы, высокой скорости и точного движения, невиданного ранее».
Роботы, использующие эту технологию, идеально подходят для естественного и реалистичного взаимодействия с людьми. При дистанционном управлении низкое трение и отсутствие люфта позволяют трансмиссии точно передавать контактные усилия оператору, обеспечивая высокоточное дистанционное осязание.
Помимо Уитни и Ходжинса, в исследовательскую группу входили Джон Марс из Disney Research, разработавший камеру и головной дисплей, и Тяньяо Чен, научный сотрудник Католического университета Америки, разработавший манипуляторы роботов. стажер в Disney Research.
Узнать больше
Исследователи разрабатывают гибридную гидравлическую трансмиссию, позволяющую создавать легкие и быстрые роботы-манипуляторы
Дополнительная информация:
«Гибридная гидростатическая трансмиссия и человек — безопасный тактильный робот-бумага для телеприсутствия» [PDF, 3,47 МБ]
Предоставлено
Disney Research
Цитата :
Гибридная гидростатическая трансмиссия позволяет роботам с человеческой грацией и точностью (12 мая 2016 г.