Содержание
Роботизированная коробка передач (РКПП) очень эффективна
Помимо коробок автоматической и механической существуют и другие виды не менее используемые в автомобилях. Таковой является и роботизированная коробка передач. В простонародье ее чаще называют коробка-робот. В данном устройстве соединены механические и автоматические функции под одним корпусом. В частности в РКПП автоматизированы функции переключения передач и выключения работы сцепления.
Таким образом, эта механическая коробка, получив «информацию» от водителя, и в зависимости от условий движения, начинает автоматизировано управляться с помощью специального электронного блока. Эта коробка передач вобрала в себя лучшие показатели работы автоматической и механической коробок, в том числе экономное расходование топлива, удобство в управлении и надежность в работе.
К тому же у роботизированной коробки цена более доступна, чем у автоматического аналога. В последнее время такая коробка пользуется огромной популярностью не только у производителей, но и у водителей авто.
Конструкция РКПП
Такую коробку еще называют полуавтоматом. И хотя, роботизированные коробки передач отличны в своем устройстве, можно выделить их основные элементы. Это наличие МКПП, сцепления, привода к нему, самих передач и блока управления. Основой устройства РКПП является механическая коробка передач.
Привод у коробки передач гидравлический или электрический. Электрический привод основан на работе сервомеханизмов. А в гидравлическом приводе ведущую роль играют гидроцилиндры. В первом случае имеем никое энергопотребление и меньшую скорость работы. Во втором случае необходимо поддерживать заданную величину давления, поэтому возрастают энергозатраты.
Роботизированная КПП с электрическим приводом используется в бюджетных моделях авто, а с гидравлическим приводом – в дорогих автомобилях и даже спортивных авто. И это вполне закономерно. Ведь при использовании гидравлического привода замечена высокая скорость переключения передач. Система управления РКПП является электронной и управляет датчиками и прочими устройствами.
Реализация работы РКПП
В Ferrari California стоит семиступенчатая роботизированная коробка “F1 DCT”
В автомобиле рычаг переключения скоростей расположен рядом с рычагом МКПП, но переключение производится вперед и назад. А в спортивных автомобилях рычаг скоростей заменен двумя педалями. При нажатии одной из них скорость увеличивается, а при нажатии другой – уменьшается.
Принцип работы роботизированной коробки передач не сложен, сочетает в себе механику и автоматику. Как только произошло переключение передач и нажатие педали газа, происходит передача сигнала к блоку управления. Коробка передач начинает давать данные о необходимой скорости движения и действующей скорости. В свою очередь, блок подбирает оптимальное значение скорости и нужный момент, когда ее необходимо переключить.
Благодаря этому происходит синхронная работа всех элементов устройства. Именно системный блок управляет работой гидромеханики, а именно, смыкает и размыкает сцепление. Весь этот процесс незаметен водителю, так как все процессы совпадают с передвижением ручки переключения скоростей.![]()
Так как электроника быстро реагирует на действия водителя и дорожные условия, то сцепление проводится автоматически без его участия. Чтобы осуществить парковку, выбрать задний ход или нейтральную трансмиссию, необходимо нажать обе педали, а затем выбрать нужное положение ручки соответственно выбранному варианту.
Сцепление в авто, оборудованном РКПП, в основном необходимо для начала движения транспортного средства. Чтобы добиться быстрого изменения скорости, необходимо перестать нажимать педаль газа и поставить ручку передачи скоростей в нужное положение.
Устройство и схема РКПП
РКПП состоит из определенных компонентов. Условно схема роботизированной коробки передач выглядит следующим образом. Обычная механическая КПП, актуаторы, система управления и внешние датчики. Стоит отметить, что работа РКПП совсем не похожа на работу автоматической коробки. Ее больше можно сравнить с работой механики с элементами автоматики.
Рассмотрим подробнее устройство роботизированной коробки передач.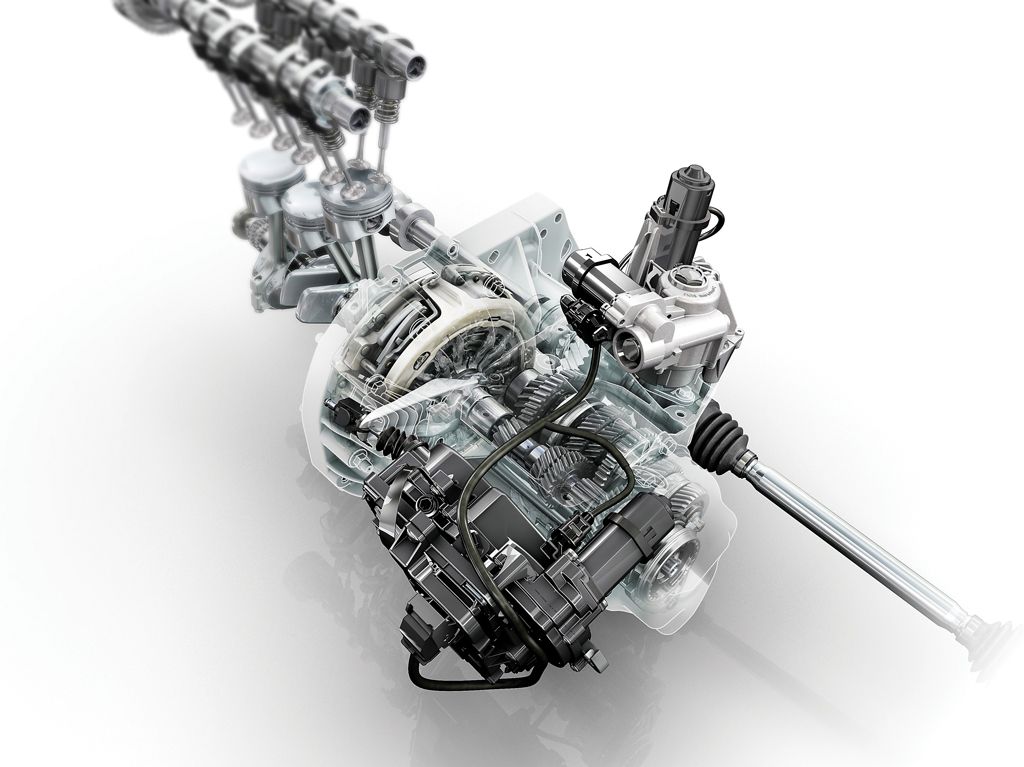 У нее имеется два ведущих вала, один находится в полости другого. На внешнем валу имеются шестерни для четных передач, а на внутреннем валу – для нечетных. Оба вала имеют сцепление. Актуаторами называют электрические и гидравлические приводы, рассмотренные подробно выше.
У нее имеется два ведущих вала, один находится в полости другого. На внешнем валу имеются шестерни для четных передач, а на внутреннем валу – для нечетных. Оба вала имеют сцепление. Актуаторами называют электрические и гидравлические приводы, рассмотренные подробно выше.
Основной элемент РКПП – блок управления, оснащенный мощным процессором. Внешние датчики подключаются к нему через специальные порты. Также чаще всего автомобили оснащены бортовыми компьютерами, которые также подключаются к системе управления. Система управления имеет память и определенные алгоритмы работы, которые успешно обрабатывают, поступающие на них сигналы и управляют коробкой передач и переключением скоростей.
А вот видео о том, как правильно использовать коробку-робот:
Также на эту тему вы можете почитать:
Поделитесь в социальных сетях
Alex S 29 октября, 2013
Опубликовано в: Полезные советы и устройство авто
Метки: Как устроен автомобиль
Роботизированная коробка передач
Трансмиссия
Можно сказать, что роботизированная коробка передач занимает промежуточное положение между механической и автоматической трансмиссиями.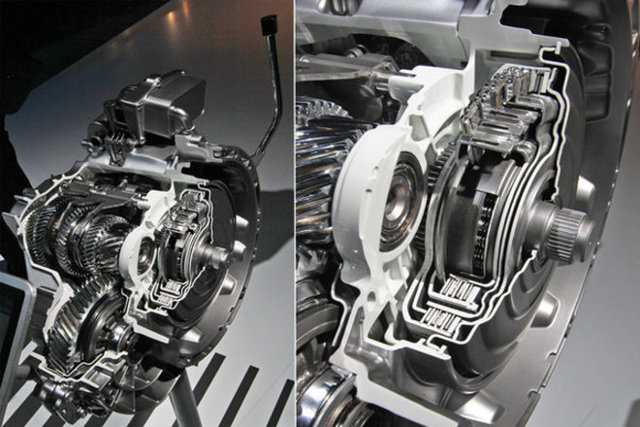 Идея создания «робота» заключалась в том, чтобы в одной коробке передач сочетались бы комфорт, надежность и экономичность с точки зрения топлива. При этом роботизированная коробка должна была стоить намного дешевле классического «автомата». Как показывает практика, обе цели в итоге были достигнуты.
Идея создания «робота» заключалась в том, чтобы в одной коробке передач сочетались бы комфорт, надежность и экономичность с точки зрения топлива. При этом роботизированная коробка должна была стоить намного дешевле классического «автомата». Как показывает практика, обе цели в итоге были достигнуты.
По сути, роботизированная коробка передач является «эволюцией» обычной механической трансмиссии. Устройство и принцип работы «механики» довольно простой. Главными составляющими элементами являются первичный (ведущий) и вторичный (ведомый) валы. На ведущий вал передается крутящий момент от двигателя. Ведомый вал преобразовывает крутящий момент и передает его на передние или задние колеса в зависимости от типа привода автомобиля.
На каждом из валов присутствуют шестерни. На ведущем валу они жестко закреплены, а на ведомом свободно вращаются. Именно поэтому, когда коробка передач находится в нейтральном положении, ведущие колеса не получают крутящий момент.
На автомобиле с обычной механической коробкой передач, водитель сначала выжимает сцепление, тем самым отсоединяя первичный вал от мотора. После этого, с помощью рычага коробки на вторичном валу начинают двигаться и перемещаться синхронизаторы, которые не позволяют муфте заблокировать шестерню, пока их скорости вращения не станут одинаковыми. Когда это условие выполнено, синхронизатор жестко блокирует шестерню выбранной передачи на вторичном валу. Чтобы крутящий момент сначала попал на ведомый вал, а от него на главную передачу и ведущие колеса, необходимо включить сцепление.
После этого, с помощью рычага коробки на вторичном валу начинают двигаться и перемещаться синхронизаторы, которые не позволяют муфте заблокировать шестерню, пока их скорости вращения не станут одинаковыми. Когда это условие выполнено, синхронизатор жестко блокирует шестерню выбранной передачи на вторичном валу. Чтобы крутящий момент сначала попал на ведомый вал, а от него на главную передачу и ведущие колеса, необходимо включить сцепление.
Но если механической трансмиссией управляет водитель, т.е. он включает и выключает сцепление, выбирает необходимую передачу, то в роботизированной коробке все эти функции выполняет электроника, которая состоит из входных датчиков, электронного блока управления и исполнительные механизмы.
Основная функция входных датчиков заключается в постоянном контроле основных параметров коробки передач. Полученная датчиками информация далее передается в электронный блок управления, который взаимодействует с различными системами автомобиля, такими как ABS, ESP, отслеживает обороты двигателя, скорость движения. Кроме этого, в блок заложена программа управления исполнительными механизмами. На основе полученных данных, электронный блок дает команды исполнительным механизмам, которыми являются сервоприводы – актуаторы.
Кроме этого, в блок заложена программа управления исполнительными механизмами. На основе полученных данных, электронный блок дает команды исполнительным механизмам, которыми являются сервоприводы – актуаторы.
Как только от электронного блока поступает команда на включение передачи, один сервопривод выжимает сцепление, второй передвигает муфту и включает выбранную передачу. Сразу после включения передачи первый сервопривод плавно отпускает сцепление. Таким образом, водителю не нужно выжимать педаль сцепления, да ее собственно и нет, так как все делает электроника.
Большинство «роботов» имеют два режима работы. В автоматическом режиме все команды, касающиеся работы сцепления и включения необходимой в данный момент передачи, поступают от электронного блока управления. В ручном режиме, водитель самостоятельно переключает передачи.
При смене передач в автоматическом режиме «робот» надолго прерывает идущую к колесам мощность от двигателя. Причем такие разрывы достаточно продолжительны во времени, чтобы водитель успел их заметить и ощутить.
Чтобы полностью исключить такие провалы или хотя бы существенно сократить время, затрачиваемое на переключение передач, в начале 1980-х годов была разработана роботизированная коробка передач с двойным сцеплением — DCT (dual clutch transmission). Самым известным представителем подобной трансмиссии является коробка DSG, которая применяется на автомобилях Volkswagen, Audi и др.
Искусственный интеллект управляет роботом-манипулятором для упаковки коробок и сокращения расходов
Исследования и инновации
Дата
26 июня 2019 г.
Система Rutgers — еще один шаг к автоматизированной упаковке
Автоматизированное рабочее место с манипулятором Kuka и контейнером с кучей предметов, которые необходимо плотно упаковать в коробку для заказа на отгрузку. Роботизированная упаковочная система Rutgers предназначена для устранения ошибок при упаковке.
Фото: Rahul Shome/Rutgers University-New Brunswick
Компьютерщики Rutgers использовали искусственный интеллект для управления роботом-манипулятором, который обеспечивает более эффективный способ упаковки коробок, экономя время и деньги предприятий.
«Мы можем создавать недорогие автоматизированные решения, которые легко развертываются. Ключ в том, чтобы сделать минимальный, но эффективный выбор оборудования и сосредоточиться на надежных алгоритмах и программном обеспечении», — сказал старший автор исследования Костас Бекрис, доцент кафедры компьютерных наук в Школе искусств и наук Университета Рутгерса в Нью-Брансуике.
Бекрис, Абдеслам Булариас и Цзинджин Ю, доценты компьютерных наук, сформировали команду для комплексного решения множества аспектов проблемы упаковки роботов с помощью аппаратного обеспечения, трехмерного восприятия и надежного движения.
Рецензируемое исследование ученых было недавно опубликовано на Международной конференции IEEE по робототехнике и автоматизации, где оно стало финалистом премии Best Paper Award in Automation. Исследование совпадает с растущей тенденцией к использованию роботов для выполнения логистических, розничных и складских задач. Достижения в области робототехники ускоряются беспрецедентными темпами благодаря алгоритмам машинного обучения, которые позволяют проводить непрерывные эксперименты.
Плотная упаковка продуктов, отобранных из неорганизованной кучи, остается в основном ручной задачей, даже несмотря на то, что это имеет решающее значение для эффективности склада. По словам научной группы Rutgers, автоматизация таких задач важна для конкурентоспособности компаний и позволяет людям сосредоточиться на менее тяжелой и физически тяжелой работе.
Исследование Рутгерса было сосредоточено на помещении предметов из мусорного ведра в небольшую упаковочную коробку и их плотном расположении. Это более сложная задача для робота по сравнению с тем, чтобы просто взять предмет и бросить его в коробку.
Исследователи разработали программное обеспечение и алгоритмы для своей роботизированной руки. Они использовали визуальные данные и простую присоску, которая служит пальцем для толкания предметов. Полученная система может опрокидывать объекты, чтобы получить желаемую поверхность для их захвата. Кроме того, он использует данные датчиков, чтобы притягивать объекты к целевой области и сталкивать объекты вместе. Во время этих операций он использует мониторинг в реальном времени для обнаружения и предотвращения потенциальных сбоев.
Во время этих операций он использует мониторинг в реальном времени для обнаружения и предотвращения потенциальных сбоев.
В этом видео на YouTube показана роботизированная рука Kuka, плотно упаковывающая предметы из корзины в коробку с заказом на доставку (в пять раз быстрее).
Поскольку исследование сосредоточено на упаковке объектов кубической формы, следующим шагом будет изучение упаковки объектов разных форм и размеров. Еще одним шагом будет изучение автоматического обучения роботизированной системы после того, как ей будет поставлена конкретная задача.
Ведущими авторами являются Рахул Шоме и Вей Н. Танг, докторанты факультета компьютерных наук. Среди соавторов были докторанты Чангю Сонг и Чайтанья Миташ, а также Христиан Куртев, научный программист Центра когнитивных наук Рутгерса. Работа была поддержана исследовательскими контрактами и грантами от исследовательского центра Кремниевой долины JD.com и Национального научного фонда.
Работа была поддержана исследовательскими контрактами и грантами от исследовательского центра Кремниевой долины JD.com и Национального научного фонда.
Роботизированная укладка на поддоны | Возможности роботизированной палетизации
Роботизированная паллетизация
Робототехника — одно из самых гибких и экономичных упаковочных решений для современного конкурентного рынка. Высокая точность, низкий уровень производственного травматизма и высокая окупаемость инвестиций делают роботизированные упаковочные системы все более предпочтительным выбором для решения задачи эффективной обработки готовой продукции.
СДЕЛАТЬ ЗАПРОС
Категория: Без категории
Теги: Автоматическая упаковка, Укладка на поддоны, Бобинорезка
Описание
Описание
Робототехника — одно из самых гибких и экономичных упаковочных решений для современного конкурентного рынка. Высокая точность, низкий уровень производственного травматизма и высокая окупаемость инвестиций делают роботизированные упаковочные системы все более предпочтительным выбором для решения задачи эффективной обработки готовой продукции.
Высокая точность, низкий уровень производственного травматизма и высокая окупаемость инвестиций делают роботизированные упаковочные системы все более предпочтительным выбором для решения задачи эффективной обработки готовой продукции.
Как работает роботизированная двойная паллетизация коробок?
Роботизированная ячейка для укладки на поддоны может одновременно загружать коробки двух разных размеров на отдельные поддоны. Робот автоматически поднимает коробку с конца одного из двух конвейеров. Технология RFID используется для связи в режиме реального времени с роботом для выполнения последовательности укладки на поддоны. Робот подносит коробку к аппликатору для печати и нанесения этикеток, где на коробку наклеиваются этикетки с информацией о продукте. Затем робот укладывает коробку на соответствующий поддон по запрограммированной схеме. Робот также размещает разделительные листы на каждом поддоне и между слоями коробок для обеспечения устойчивости. Когда поддон готов, оператор может на мгновение отключить ячейку укладки на поддоны, чтобы удалить готовый поддон, не останавливая остальную часть упаковочной линии. После размещения пустого поддона и включения ячейки можно продолжить укладку на поддоны.
После размещения пустого поддона и включения ячейки можно продолжить укладку на поддоны.
Как работает роботизированная паллетизация коробок?
Робот снимает упакованные рулоны с накопительного конвейера и укладывает их на поддон. Робот укладывает коробки на поддон по запрограммированной схеме. Робот также размещает разделительные листы на каждом поддоне и между слоями коробок для обеспечения устойчивости. Когда поддон готов, он продвигается к концу конвейера с электроприводом.
Поддон пройдет через приглушающую световую завесу безопасности. Эта секция находится на глубине одного поддона за пределами ограждения, что позволяет операторам снимать ее с помощью вилочного погрузчика. Дополнительные поддоны выдаются из автоматического распределителя поддонов.
Как работает роботизированная паллетизация рулонов?
Специальная «инструментальная оснастка на конце руки» для этого робота разработана и запрограммирована для выполнения двух функций; обработка рулонов и обработка прокладочных листов.
Когда комплект готовых рулонов достигает конца конвейера, робот поднимает рулоны, поворачивает их вертикально и укладывает на поддон в заранее определенном порядке. Робот можно запрограммировать на автоматическую укладку готовых рулонов на поддоны по различным схемам укладки.
После того, как каждый поддон будет готов, предыдущий поддон пройдет через световую завесу приглушения и попадет в зону накопления. Эта секция находится на глубине одного поддона за пределами ограждения по периметру, что позволяет операторам снимать поддон, не прерывая работу.
Дополнительные поддоны выдаются из автоматического распределителя поддонов. Оказавшись на месте, робот кладет картонный лист на поддон, и процесс повторяется.
Работает ли роботизированная укладка на поддоны с очень большими рулонами?
Универсальность этого робота позволяет укладывать и укладывать на поддоны большие рулоны шириной от 3 до 36 дюймов, диаметром от 8 до 18 дюймов и весом от 17 до 200 фунтов.
Рулоны большого диаметра перемещаются по конвейеру с нулевым противодавлением и размещаются в точке захвата роботом.
При обработке рулонов узкой ширины в специальной «инструментальной оснастке для конца руки» используется вакуумный захват, который соприкасается с верхней поверхностью рулона. Включается вакуум, рулон захватывается и помещается на поддон в соответствии с запрограммированной схемой. Робот также размещает прокладочные листы на поддоне и между слоями рулона для обеспечения устойчивости и поддержания качества рулона. Когда поддон готов, он перемещается в одну из трех позиций размещения полного поддона. Третье промежуточное положение позволит оператору снять его с помощью вилочного погрузчика.
При обработке рулонов большей ширины робот на конце манипулятора использует устройство зажима рулона для захвата и размещения рулонов. Робот будет продолжать собирать и размещать рулоны до тех пор, пока поддон не будет заполнен. Дополнительные поддоны размещаются вручную на переднем конце конвейера для укладки на поддоны и автоматически индексируются в ячейке для укладки на поддоны.
Как работает укладка рулонов на поддоны?
Эта автоматизированная упаковочная линия укладывает рулоны плоттерной бумаги и бумаги для струйных принтеров на поддоны с длиной готовых рулонов 500 и 600 футов. Большая картонная туба крепится к поддону перед упаковкой. Ряд пневматических толкателей создает запрограммированный рисунок слоев с готовыми рулонами. После завершения слоя формовочный стол перемещается в коробку и перемещает рулоны. Бак и поддон переворачиваются на бок по мере того, как слои готовых рулонов перемещаются в бак. Как только последний слой загружен, подъемник опускает ванну. Конвейерная система перемещает ванну в перекладину и поворачивает ее вертикально. Как только заполненная ванна достигает конца выходного конвейера, оператор может извлечь ее из системы с помощью вилочного погрузчика.
Также предлагается аналогичная система, в которой используется подъемный подъемник для подъема и опускания пластины переноса на схему слоев для бака. Это позволяет баку и поддону оставаться в одном положении во время процесса загрузки. Эта система укладки на поддоны также предлагала возможность укладки ящиков на поддоны.
Эта система укладки на поддоны также предлагала возможность укладки ящиков на поддоны.
Как работает паллетирование ящиков?
Перед укладкой коробок на поддоны эта автоматическая упаковочная линия вкладывает по 2 рулона в каждую коробку.
Поддон переворачивается на бок, когда коробки переносятся на поддон. Ряд пневматических толкателей создает запрограммированный слой с коробками. После завершения слоя формовочный стол перемещает коробки и переносит их на поддон. Как только последний слой загружен, перекладчик поворачивает загруженный поддон в вертикальное положение. Оператор может удалить его из системы с помощью вилочного погрузчика. Эта система укладки на поддоны также предлагала возможность укладки на поддоны сыпучих рулонов.
Возможности роботизированной укладки на поддоны
Как работает роботизированная двойная паллетизация коробок?
Роботизированная ячейка для укладки на поддоны может одновременно загружать коробки двух разных размеров на отдельные поддоны. Робот автоматически поднимает коробку с конца одного из двух конвейеров. Технология RFID используется для связи в режиме реального времени с роботом для выполнения последовательности укладки на поддоны. Робот подносит коробку к аппликатору для печати и нанесения этикеток, где на коробку наклеиваются этикетки с информацией о продукте. Затем робот укладывает коробку на соответствующий поддон по запрограммированной схеме. Робот также размещает разделительные листы на каждом поддоне и между слоями коробок для обеспечения устойчивости. Когда поддон готов, оператор может на мгновение отключить ячейку укладки на поддоны, чтобы удалить готовый поддон, не останавливая остальную часть упаковочной линии. После размещения пустого поддона и включения ячейки можно продолжить укладку на поддоны.
Робот автоматически поднимает коробку с конца одного из двух конвейеров. Технология RFID используется для связи в режиме реального времени с роботом для выполнения последовательности укладки на поддоны. Робот подносит коробку к аппликатору для печати и нанесения этикеток, где на коробку наклеиваются этикетки с информацией о продукте. Затем робот укладывает коробку на соответствующий поддон по запрограммированной схеме. Робот также размещает разделительные листы на каждом поддоне и между слоями коробок для обеспечения устойчивости. Когда поддон готов, оператор может на мгновение отключить ячейку укладки на поддоны, чтобы удалить готовый поддон, не останавливая остальную часть упаковочной линии. После размещения пустого поддона и включения ячейки можно продолжить укладку на поддоны.
Как работает роботизированная паллетизация коробок?
Робот снимает упакованные рулоны с накопительного конвейера и укладывает их на поддон. Робот укладывает коробки на поддон по запрограммированной схеме.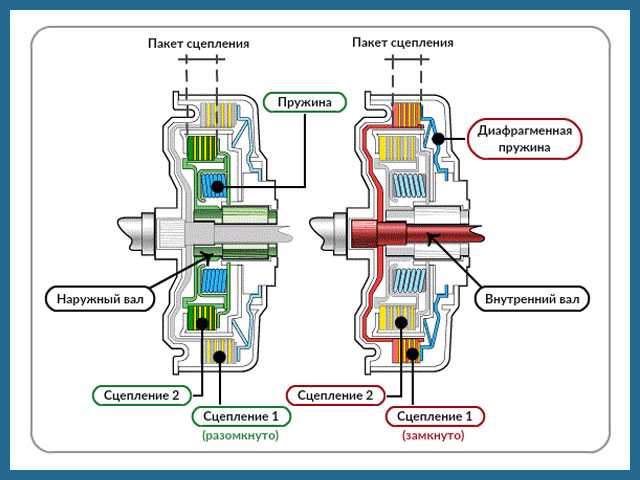 Робот также размещает разделительные листы на каждом поддоне и между слоями коробок для обеспечения устойчивости. Когда поддон готов, он продвигается к концу конвейера с электроприводом.
Робот также размещает разделительные листы на каждом поддоне и между слоями коробок для обеспечения устойчивости. Когда поддон готов, он продвигается к концу конвейера с электроприводом.
Поддон пройдет через приглушающую световую завесу безопасности. Эта секция находится на глубине одного поддона за пределами ограждения, что позволяет операторам снимать ее с помощью вилочного погрузчика. Дополнительные поддоны выдаются из автоматического распределителя поддонов.
Как работает роботизированная паллетизация рулонов?
Специальная «инструментальная оснастка на конце руки» для этого робота разработана и запрограммирована для выполнения двух функций; обработка рулонов и обработка прокладочных листов.
Когда комплект готовых рулонов достигает конца конвейера, робот поднимает рулоны, поворачивает их вертикально и укладывает на поддон в заранее определенном порядке. Робот можно запрограммировать на автоматическую укладку готовых рулонов на поддоны по различным схемам укладки.
После того, как каждый поддон будет готов, предыдущий поддон пройдет через световую завесу приглушения и попадет в зону накопления. Эта секция находится на глубине одного поддона за пределами ограждения по периметру, что позволяет операторам снимать поддон, не прерывая работу.
Дополнительные поддоны выдаются из автоматического распределителя поддонов. Оказавшись на месте, робот кладет картонный лист на поддон, и процесс повторяется.
Работает ли роботизированная укладка на поддоны с очень большими рулонами?
Универсальность этого робота позволяет укладывать и укладывать на поддоны большие рулоны шириной от 3 до 36 дюймов, диаметром от 8 до 18 дюймов и весом от 17 до 200 фунтов.
Рулоны большого диаметра перемещаются по конвейеру с нулевым противодавлением и размещаются в точке захвата роботом.
При обработке рулонов узкой ширины в специальной «инструментальной оснастке для конца руки» используется вакуумный захват, который соприкасается с верхней поверхностью рулона. Включается вакуум, рулон захватывается и помещается на поддон в соответствии с запрограммированной схемой. Робот также размещает прокладочные листы на поддоне и между слоями рулона для обеспечения устойчивости и поддержания качества рулона. Когда поддон готов, он перемещается в одну из трех позиций размещения полного поддона. Третье промежуточное положение позволит оператору снять его с помощью вилочного погрузчика.
Включается вакуум, рулон захватывается и помещается на поддон в соответствии с запрограммированной схемой. Робот также размещает прокладочные листы на поддоне и между слоями рулона для обеспечения устойчивости и поддержания качества рулона. Когда поддон готов, он перемещается в одну из трех позиций размещения полного поддона. Третье промежуточное положение позволит оператору снять его с помощью вилочного погрузчика.
При обработке рулонов большей ширины робот на конце манипулятора использует устройство зажима рулона для захвата и размещения рулонов. Робот будет продолжать собирать и размещать рулоны до тех пор, пока поддон не будет заполнен. Дополнительные поддоны размещаются вручную на переднем конце конвейера для укладки на поддоны и автоматически индексируются в ячейке для укладки на поддоны.
Как работает укладка рулонов на поддоны?
Эта автоматизированная упаковочная линия укладывает рулоны плоттерной бумаги и бумаги для струйных принтеров на поддоны с длиной готовых рулонов 500 и 600 футов. Большая картонная туба крепится к поддону перед упаковкой. Ряд пневматических толкателей создает запрограммированный рисунок слоев с готовыми рулонами. После завершения слоя формовочный стол перемещается в коробку и перемещает рулоны. Бак и поддон переворачиваются на бок по мере того, как слои готовых рулонов перемещаются в бак. Как только последний слой загружен, подъемник опускает ванну. Конвейерная система перемещает ванну в перекладину и поворачивает ее вертикально. Как только заполненная ванна достигает конца выходного конвейера, оператор может извлечь ее из системы с помощью вилочного погрузчика.
Большая картонная туба крепится к поддону перед упаковкой. Ряд пневматических толкателей создает запрограммированный рисунок слоев с готовыми рулонами. После завершения слоя формовочный стол перемещается в коробку и перемещает рулоны. Бак и поддон переворачиваются на бок по мере того, как слои готовых рулонов перемещаются в бак. Как только последний слой загружен, подъемник опускает ванну. Конвейерная система перемещает ванну в перекладину и поворачивает ее вертикально. Как только заполненная ванна достигает конца выходного конвейера, оператор может извлечь ее из системы с помощью вилочного погрузчика.
Также предлагается аналогичная система, в которой используется подъемный подъемник для подъема и опускания пластины переноса на схему слоев для бака. Это позволяет баку и поддону оставаться в одном положении во время процесса загрузки. Эта система укладки на поддоны также предлагала возможность укладки ящиков на поддоны.
Как работает паллетирование ящиков?
Перед укладкой коробок на поддоны эта автоматическая упаковочная линия вкладывает по 2 рулона в каждую коробку.