Содержание
Обзор робота-пылесоса Redmond RV-R630S с возможностью влажной уборки
Робот-пылесос Redmond RV-R630S — довольно простой и относительно недорогой прибор, способный производить как сухую, так и влажную уборку. В качестве достоинств модели отметим наличие дистанционного управления (с помощью пульта либо мобильного приложения), а также элегантный внешний вид.
В ходе тестирования мы проверим, как он очищает полы, сколько времени ему требуется для зарядки и насколько хорошо он объезжает мебель. С учетом относительно невысокой цены, эффективность прибора мы будем сравнивать с устройствами из той же ценовой категории.
Характеристики
| Производитель | Redmond |
|---|---|
| Модель | RV-R630S WiFi |
| Тип | вакуумный робот-пылесос |
| Страна производства | Китай |
| Гарантия | 1 год |
| Гарантия на аккумулятор | не указана |
| Предполагаемый срок службы | 3 года |
| Тип уборки | сухая и влажная |
| Автоматическая уборка | да |
| Автоматическое возвращение на базу | да |
| Объем контейнера для пыли | 0,6 л |
| Объем контейнера для воды | 0,2 л |
| Уровень шума | 68 дБ(А) |
| Максимальная мощность | 22 Вт |
| Время работы от аккумулятора | до 120 минут |
| Время зарядки аккумулятора | до 5 часов |
| Аккумулятор | литий-ионный, 2600 мА·ч, 14,8 В |
| Пульт дистанционного управления | есть |
| Вес | 2,45 кг |
| Габариты | диаметр 325 мм, высота 77 мм |
| Длина сетевого кабеля | 1,5 м |
| Розничные предложения | узнать цену |
Комплектация
Прибор попал к нам на тестирование упакованным в картонную коробку с хорошо узнаваемым логотипом Redmond. Размер коробки оказался стандартным для роботов-пылесосов. На внешних плоскостях можно увидеть изображения самого робота, а также ознакомиться с его основными особенностями и характеристиками. Для защиты и фиксации содержимого применяются формы из прессованного картона и пластиковые пакеты. Коробка оснащена пластиковой ручкой, поэтому донести покупку до дома (либо перевезти пылесос на новое место жительства будет нетрудно)
Размер коробки оказался стандартным для роботов-пылесосов. На внешних плоскостях можно увидеть изображения самого робота, а также ознакомиться с его основными особенностями и характеристиками. Для защиты и фиксации содержимого применяются формы из прессованного картона и пластиковые пакеты. Коробка оснащена пластиковой ручкой, поэтому донести покупку до дома (либо перевезти пылесос на новое место жительства будет нетрудно)
Внутри мы обнаружили:
- сам пылесос с электрощеткой, пылесборником и HEPA-фильтром
- базу для зарядки
- адаптер питания базы
- два комплекта боковых щеток
- контейнер для влажной уборки с микрофибровой тряпкой
- запасную тряпку
- пульт дистанционного управления
- щетку для очистки устройства
- запасной HЕРА-фильтр
- сменную пластиковую панель
- руководство по эксплуатации
- гарантийный талон
- рекламные материалы
Запасные части и расходные материалы в комплекте поставки, таким образом, оказались представлены запасным HEPA-фильтром, вторым комплектом боковых щеточек (первый комплект пользователь устанавливает сразу), сменной тряпкой (насадкой) для влажной уборки и запасной пластиковой панелью, с помощью которой пылесос может сменить окраску и превратиться из черного в белый.
На первый взгляд
Визуально наш робот-пылесос выглядит вполне стандартно. Корпус у прибора пластиковый, матовый. Выглядит он строго и «серьезно». Особое внимание привлекает, разве что, контейнер для воды, который выступает за основные габариты устройства.
Также сразу упомянем о наличии дополнительной декоративной крышки, с помощью которой можно изменить внешний вид устройства. Запасная крышка также может пригодиться в случае, если основная будет поцарапана или повреждена. Крепится крышка на десять небольших пластиковых защелок.
Давайте теперь рассмотрим устройство повнимательнее.
На верхней панели мы видим логотип компании и миниатюрную панель управления со светодиодной подсветкой. Смотрится вся конструкция прочно, надежно и убедительно.
Как водится, корпус опирается на три колеса: два ведущих и одно направляющее. Ведущие колеса снабжены резиновыми протекторами с выраженными «грунтозацепами», цель которых — не допустить проскальзывания на гладком полу и улучшить проходимость на ковровых покрытиях.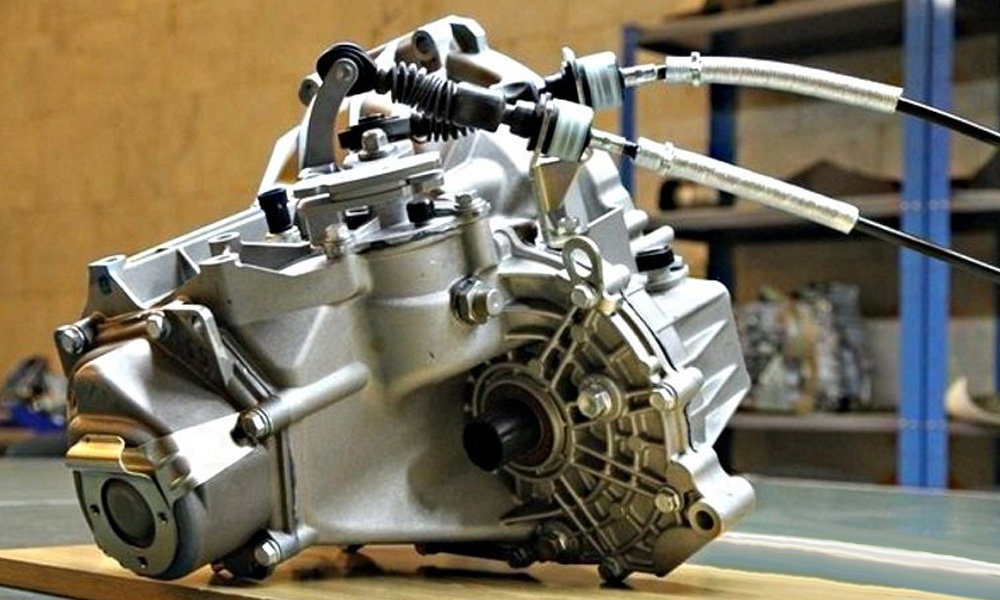 Подпружиненная подвеска имеет ход в 25 мм.
Подпружиненная подвеска имеет ход в 25 мм.
Направляющее колесо пластиковое. Оно заключено в пластиковую же сферу, допускающую свободное вращение на 360°. По обе стороны от колеса размещаются контакты для зарядки на базе. Также в передней части корпуса можно увидеть гнезда для крепления боковых щеток, а по центру и по бокам — окошки оптических (инфракрасных) датчиков поверхности.
В центре нижней панели расположена основная электрощетка с V-образными резиновыми ламелями, чередующимися с рядами синтетической щетины. Фиксируется она обычной пластиковой рамкой с двумя защелками.
Какой-либо защиты от наматывания проводов (типа перемычек в рамке) у нашей модели не предусмотрено.
Левая ось щетки опирается на круглый подшипник, правая — вставляется в четырехугольное отверстие привода. Таким образом, установить щетку в пылесос можно единственным способом (правильным).
Рядом с контактами для зарядки на базе находится крышка аккумуляторного отсека, закрывающаяся на два винта. Блок питания представляет собой сборку из четырех аккумуляторов форм-фактора 18650. Номинальная емкость аккумулятора — 2600 мА·ч.
Блок питания представляет собой сборку из четырех аккумуляторов форм-фактора 18650. Номинальная емкость аккумулятора — 2600 мА·ч.
Мы всегда отмечаем использование для питания пылесоса сборки из аккумуляторов одного из стандартных форм-факторов: даже если производитель через некоторое время прекратит выпуск готовых сборок для данной модели из-за ее устаревания, всегда можно починить выработанную батарею своими руками.
В задней части корпуса находится место для установки пылесборника.
Переднюю половину боковой стороны устройства занимает подвижный подпружиненный бампер с ходом в 4-5 мм. Его нажатие вызывает срабатывание механических датчиков приближения. За затемненным стеклом бампера размещаются ИК-датчики, позволяющие пылесосу обнаруживать препятствия, находить базу и принимать сигналы пульта управления.
Модуль сухой уборки устанавливается на свое место с легким щелчком и фиксируется с помощью защелки-кнопки.
У него предусмотрена откидная крышка, под которой расположены съемный фильтр грубой очистки из синтетического материала, поролоновый фильтр и HEPA-фильтр.
Так выглядит модуль с другой стороны.
Откидная крышка фиксируется на магните.
На контейнере можно найти наклейку-подсказку с правилами очистки пылесборника, так что заглядывать в инструкцию лишний раз не придется.
Модуль для влажной уборки «пристегивается» к пылесосу сзади и фиксируется с помощью защелки-кнопки
Отверстие для наполнения находится сбоку и закрыто резиновой пробкой. Микрофибровая тряпка фиксируется на модуле при помощи трех довольно больших «липучек»-велкро. Отметим, что у нашего экземпляра две из трех липучек оказались наклеены на сам модуль мимо предусмотренных для них углублений, из-за чего по краю уже начали постепенно отклеиваться.
Вода, увлажняющая тряпку, поступает из бака через пару отверстий, проложенных внутри корпуса несъемным тканевым материалом.
Выключатель устройства расположен на боковой грани, рядом с разъемом для подключения зарядного устройства в обход базы, напрямую.
Верхняя часть пластиковой базы выполнена из ИК-прозрачного пластика, под которым стоят датчики, обеспечивающие позиционирование робота при возвращении на зарядку. У базы есть светодиод, сигнализирующий о ходе заряда батареи. Контакты подпружинены и имеют ход около 3 мм.
У базы есть светодиод, сигнализирующий о ходе заряда батареи. Контакты подпружинены и имеют ход около 3 мм.
Инфракрасный пульт дистанционного управления питается от двух батареек типа ААА. Сам пульт сделан из пластика, по форм-фактору и расположению кнопок напоминает хорошо известный пульт от Xiaomi. Пластик матовый и это хорошо: пульт не поцарапается при падении или неаккуратном обращении.
Съемные боковые щетки делятся на «левые» и «правые». Маркировка присутствует как на самих щетках, так и на корпусе пылесоса, поэтому перепутать их при установке можно разве что намеренно. В комплекте с устройством идут две пары щеток.
В коробке с пылесосом также можно найти запасную тряпку, запасной HEPA-фильтр и специальную пластиковую щетку с ножом для очистки всех элементов прибора.
Подводим итог визуальному осмотру: перед нами вполне стандартный недорогой прибор со стандартным же качеством сборки и используемых материалов. Претензий у нас практически не нашлось, за исключением качества наклейки липучек-велкро.
Из необычного — еще раз отметим наличие запасной панели, позволяющей сменить внешний вид устройства с черного на белый.
Инструкция
Руководство пользователя представляет собой компактную брошюру, отпечатанную на качественной матовой бумаге. На долю русского языка в брошюре приходится 17 страниц (включая иллюстрации). Содержание инструкции стандартное: технические характеристики, комплектация, сборка и использование, выбор режима работы и управление уход за прибором и т. п.
Как принято у разработчиков роботов-пылесосов, все необходимые действия и манипуляции, с которыми предстоит столкнуться в ходе использования прибора, проиллюстрированы черно-белыми изображениями, благодаря чему разобраться с правилами эксплуатации и ухода за пылесосом будет легко и просто. Теоретически можно почти всему научиться «по картинкам».
Текста в инструкции немного, все исключительно по делу. Качество брошюры и текста — высокое, как это принято у Redmond.
Управление
Робот-пылесос управляется с помощью двух кнопок, размещенных на верхней панели. Одна из кнопок отвечает за запуск прибора в режиме автоматической уборки (либо влажной уборки, если установлен соответствующий контейнер).
Одна из кнопок отвечает за запуск прибора в режиме автоматической уборки (либо влажной уборки, если установлен соответствующий контейнер).
Вторая — возвращает прибор на базу для подзарядки.
Кнопка запуска уборки также служит для постановки робота на паузу. Пылесос, находящийся на паузе в течении длительного времени, переходит в спящий режим.
Светодиодная подсветка подсказывает пользователю о том, в каком статусе находится робот в данный момент.
| Состояние прибора | Цвет индикатора |
|---|---|
| Индикатор зарядки горит зеленым | пылесос полностью заряжен |
| Индикатор зарядки мигает желтым | пылесос заряжается |
| Кнопка включения горит зеленым | пылесос готов к работе |
| Отключен/В спящем режиме | не светится |
Включение и выключение прибора осуществляется при помощи клавиши на на боковой части устройства панели, расположенной рядом с разъемом для подключения зарядного устройства.
Дистанционное управление
Пульт устройства питается от двух батареек ААА и имеет двенадцать кнопок.
Наверху расположена кнопка включения устройства и кнопка возвращения на базу, ниже — кнопки для запуска и остановки уборки и кнопки для ручного управления прибором.
Под ними — кнопки уменьшения либо увеличения мощности всасывания (всего доступно три режима), а ниже — кнопки для запуска специальных программ:
- уборка фиксированной области (прибор движется по спирали, постепенно расширяя территорию)
- режим уборки углов (пылесос движется вдоль стен по периметру помещения)
Управление со смартфона
Робот-пылесос допускает возможность дистанционного управления — при наличии в доме сети Wi-Fi, а на смартфоне пользователя — специального приложения Redmond Robot.
После установки приложение попросит привязать устройство.
Как водится, для работы потребуется сеть Wi-Fi, работающая на частоте 2,4 ГГц. Более быстрые и современные сети 5 ГГц не поддерживаются.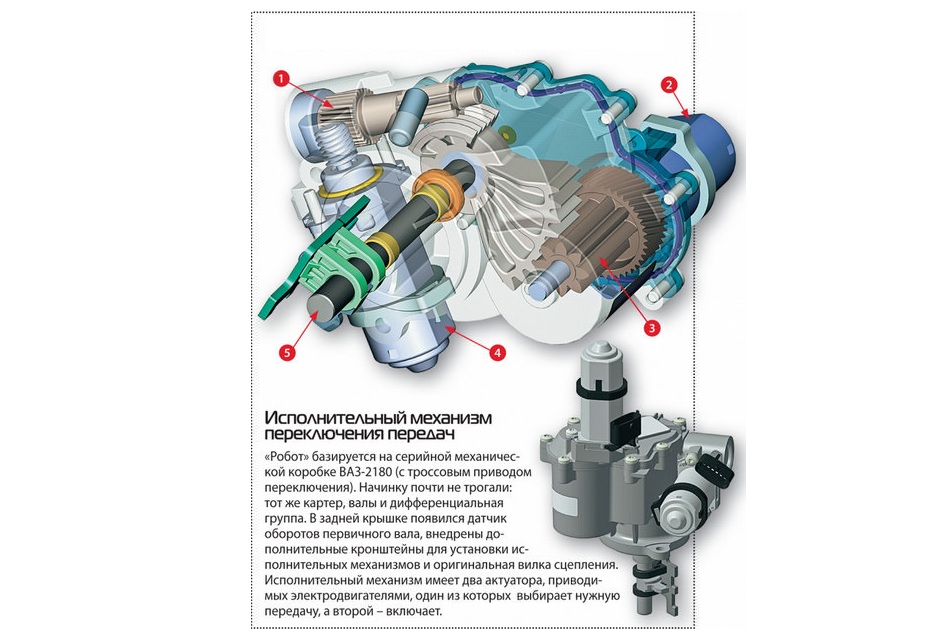
Сопряжение с устройством потребует от пользователя нажать кнопку на устройстве.
После первоначальной настройки произошло обновление прошивки робота.
Все описанные выше операции прошли без каких-либо проблем или сложностей. Пылесос уверенно определился и привязался к смартфону, после чего мы получили доступ к его настройкам.
Тут мы можем включить, либо отключить голосовые оповещения, настроить уборку по расписанию, установить единицы измерения убранной площади, а также поделиться доступом к пылесосу с другими пользователями.
Допускается создание нескольких расписаний уборки, каждое из которых можно включать или отключать независимо друг от друга.
На основном экране мы видим основную информацию об устройстве — убранную площадь, оставшийся заряд и время, которое прошло с начала текущей уборки.
В нижней части экрана расположены кнопки управления, позволяющие поставить прибор на паузу, переключить режим уборки, изменить силу всасывания или отправить пылесос на подзарядку.
По центру экрана располагается карта, которую робот строит в процессе уборки.
Глядя на нее, мы в очередной раз задаемся вопросом — а нужно ли отображать такую карту? Очевидно, что робот сбивается и путается даже в нашем простом тестовом помещении — прямоугольной комнате с минимумом препятствий.
Вот какой она представляется в сознании робота:
Почему так происходит? Судя по всему, прибор неправильно фиксирует собственные повороты (неправильно замеряет угол, на который он повернулся). Из-за этого прямые углы в сознании робота становятся острыми (или тупыми), и стенки на карте «съезжают».
На скриншоте выше типичный пример такой ситуации: на третьей минуте уборки робот обнаружил прямой угол, но ошибся и нарисовал его на карте как тупой.
Управление с помощью Алисы
Помимо управления со специального приложения, наш робот допускает управление с помощью Алисы Яндекса.
Настройка прибора оказалась вполне стандартной. Сначала указываем комнату, в которой находится робот.
Потом убеждаемся, что приложение «видит» нашего робота.
И, наконец, получаем доступ к голосовым командам, список которых приведен на скриншотах ниже.
Ручного управления роботом не предусмотрено. «Пульт» позволяет лишь включить либо отключить устройство.
Эксплуатация
Перед началом эксплуатации пылесос необходимо освободить от всех упаковочных материалов, включая транспортировочные прокладки между корпусом и бампером устройства.
Боковые щетки необходимо установить на посадочные места, базу — подключить к адаптеру питания.
Перед первым использованием рекомендуется полностью зарядить аккумулятор (а еще лучше — оставить его заряжаться на 12 часов).
Разместив базу на полу, мы полностью зарядили аккумулятор пылесоса — на это ушло около трех часов (при том, что полностью разряженный аккумулятор заряжается до 5 часов). Аккумулятор также можно зарядить напрямую, не подключая робота к базе.
Робот без проблем «подружился» и с мобильным приложением Redmond (его можно загрузить с помощью специального QR-кода, либо просто найдя в магазине приложений), и с Алисой Яндекса.
После первого запуска мы обнаружили, что все действия и полученные команды робот сопровождает голосовыми сообщениями.
Судя по тому, как робот начинает обходить помещение, он пытается построить карту помещения и последовательно обойти его «змейкой». Сразу скажем, что получается это у него далеко не всегда.
В режиме влажной уборки эта модель равномерно, без разводов и капель, протирает поверхность.
Уборку в автоматическом режиме робот продолжает до тех пор, пока уровень заряда не падает до минимума, необходимого для возвращения на подзарядку.
В режиме уборки вдоль стен прибор обходит помещение по периметру, а при запуске сценария локальной уборки пылесос двигается концентрически от места старта (расширяя, а потом сужая область) и обрабатывает площадь диаметром приблизительно в 1 метр.
При влажной уборке пылесос не только всасывает пыль, но и протирает полы. При мытье полов робот оставляет за собой равномерно влажный — без разводов, капель и подтеков — след, который довольно быстро высыхает. Оставлять пылесос на зарядке с модулем влажной уборки прямо запрещено инструкцией, да и в принципе рекомендуется присматривать за роботом во время влажной уборки: если он застрянет, то вытекающая вода запросто может повредить паркет или ламинат.
Оставлять пылесос на зарядке с модулем влажной уборки прямо запрещено инструкцией, да и в принципе рекомендуется присматривать за роботом во время влажной уборки: если он застрянет, то вытекающая вода запросто может повредить паркет или ламинат.
Уход
Практически все указания по уходу за пылесосом приведены в виде картинок-комиксов.
Изучив их, мы узнаем, что пластиковые части прибора можно протирать влажной отжатой тканевой салфеткой или тканью. Пылесборник устройства рекомендуется очищать после каждой уборки, не допуская его переполнения, мыть пылесборник или погружать его в воду запрещается. HEPA-фильтр можно, согласно инструкции, очищать с помощью щеточки, которая прилагается к пылесосу, промывать его запрещается прямым текстом.
Центральную щетку также следует чистить после каждой уборки. Волосы и нитки также можно срезать с помощью ножа на входящей в комплекте универсальной чистящей щётке. Все элементы требуется тщательно просушить после очистки.
Щетка прибора, насадка и контейнер для влажной уборки могут быть очищены в проточной воде.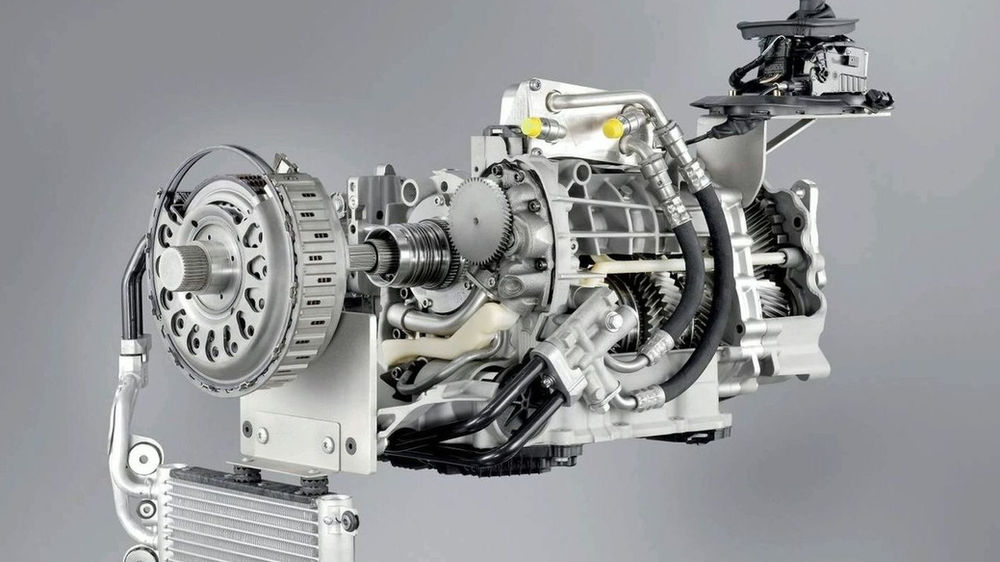 Остальные элементы придется протирать вручную с помощью влажной ткани.
Остальные элементы придется протирать вручную с помощью влажной ткани.
Контейнер для влажной уборки следует опорожнить по завершении уборки.
Тряпки для протирки пола рекомендуют промывать под проточной водой. Допускается использование моющего средства. Сушку следует производить в естественном режиме. Можно ли пользоваться стиральной машиной — не уточняется.
Датчики и контакты прибора следует очищать сухой мягкой тканью без механического воздействия.
Наши измерения
Мы представляем результаты тестирования устройства по нашей методике, подробно описанной в отдельной статье.
Видео ниже снято с одной точки с полным охватом убираемой территории, при обработке часть видеоряда ускорена в шестнадцать раз. В течение всей уборки пылесос был включен в автоматическом режиме.
За первые 10 минут наш робот обошел практически всю тестовую площадку и почти добрался до «ловушки» (на это ему не хватило времени). Отметим, что несмотря на странное построение карты, пылесос честно пытается пройти все помещение «змейкой», что, надо сказать, поначалу ему неплохо удается.
За первые 10 минут собрано было 53,9% мусора.
Однако в начале второй десятиминутки что-то пошло не так: робот почти зашел в «ловушку», но передумал и взялся путешествовать по уже пройденным участкам, снова стараясь пройти их «змейкой» (в частности, вернулся в ближний правый угол площадки).
Тем не менее, пробег оказался вполне результативен: вес собранного риса увеличился на 25,7 граммов, что в сумме (за 20 минут) составило 79,6%.
На третьем десятке минут мусор на тестовой площадке остался в непосредственной близости от базы и в «ловушке». Тут робот снова ходил «змейкой», но на этот раз преимущественно «поперек», а не «вдоль» тестового помещения, заново проходя уже очищенные участки. И до ловушки он снова не добрался!
Результат более чем скромный — 0,4 грамма.
Итого за полчаса робот смог собрать 80% мусора.
Четвертый этап тестирования — 30-минутная уборка в автоматическом режиме. За это время количество убранного увеличилось еще на 11,8%. Видеофиксация этого этапа не велась.
Результаты такой уборки мы оцениваем, как средние. За первые 20 минут робот собрал без малого 80% мусора, после чего эффективность его работы резко снизилась, и в итоге он справился с примерно 92% рассыпанного нами риса.
Напомним, что, согласно инструкции по эксплуатации, база должна быть установлена на расстоянии не менее 1-2 метров от возможных препятствий, поэтому мы ожидали, что зона около базы окажется убрана плохо.
| Интервал | Общее время уборки, мин. | % (суммарный) |
|---|---|---|
| Первые 10 минут | 10 | 53,9 |
| Вторые 10 минут | 20 | 79,6 |
| Третьи 10 минут | 30 | 80 |
| Продолжение | 60 | 91,8 |
Что помешало роботу выступить более эффективно? На наш взгляд — виновата система построения карты, ошибки в которой привели к тому, что робот не смог добраться до некоторых участков помещения (а ведь если бы он ездил в случайном направлении, то рано или поздно пропылесосил бы и там, куда не дошел в силу своего большого ума!)
Прибор, вставший на базу по окончании работы в автоматическом режиме, заряжается в течение приблизительно 4 часов 45 минут. В это время база потребляет примерно 13,4 Вт, в режиме ожидания ее энергопотребление меньше 0,1 Вт. На полный заряд устройства требуется в среднем 0,049 кВт·ч электроэнергии. За один час робот можно успеть зарядить примерно на 20% (это потребует около 0,013 кВт·ч электроэнергии).
В это время база потребляет примерно 13,4 Вт, в режиме ожидания ее энергопотребление меньше 0,1 Вт. На полный заряд устройства требуется в среднем 0,049 кВт·ч электроэнергии. За один час робот можно успеть зарядить примерно на 20% (это потребует около 0,013 кВт·ч электроэнергии).
Вес пылесоса с установленным пылесборником составил, по нашим измерениям, 2450 г. Блок пылесборника весит 274 г, контейнер для воды — 171 г.
Что касается режима влажной уборки, то он в нашем случае оказался вполне стандартным (несмотря на несколько необычный вид контейнера для воды). Воды в пылесос получится залить совсем немного — около 0,2 л, а следовательно речь тут может идти лишь о том, чтобы слегка протереть пол, а не полноценно его вымыть.
Уровень шума на стандартном режиме в непосредственной близости (на расстоянии около 1 метра) от пылесоса достигает до 63 дБ, на режиме усиленного всасывания — до 66 дБ, что чуть ниже заявленных характеристик.
Выводы
Робот-пылесос Redmond RV-R630S WiFi произвел на нас противоречивое впечатление. С одной стороны, перед нами предстал по всем признакам приличный и серьезный прибор: система построения карты, управления с мобильного приложения и через Алису, пульт ДУ — казалось бы, разработчик предусмотрел почти все. Однако на практике робот умудрился заблудиться в даже относительно несложном помещении и пропустить некоторые участки нашего тестового полигона. При этом свободное пространство и те участки, до которых он добрался, были убраны практически идеально.
С одной стороны, перед нами предстал по всем признакам приличный и серьезный прибор: система построения карты, управления с мобильного приложения и через Алису, пульт ДУ — казалось бы, разработчик предусмотрел почти все. Однако на практике робот умудрился заблудиться в даже относительно несложном помещении и пропустить некоторые участки нашего тестового полигона. При этом свободное пространство и те участки, до которых он добрался, были убраны практически идеально.
Выводы получаются довольно очевидные: наличие системы построения карты не гарантирует, что робот будет действовать эффективнее, чем конструктивно схожая модель без такой опции. Тестирование подтверждает наши догадки: либо робот умеет строить карту с высокой точностью, либо эта опция практически не влияет на качество уборки в сравнении с приборами, которые перемещаются случайным образом.
Если же не зацикливаться на построении карты, то модель получалась, на наш взгляд, вполне удачная. Пользоваться роботом оказалось просто и приятно. Отметим также наличие специальных программ для уборки загрязненных областей и возможность запустить робота вдоль стен, если в процессе автоматической уборки он вдруг пропылесосил там недостаточно хорошо.
Отметим также наличие специальных программ для уборки загрязненных областей и возможность запустить робота вдоль стен, если в процессе автоматической уборки он вдруг пропылесосил там недостаточно хорошо.
Плюсы:
- неплохое качество уборки мусора
- управление по Wi-Fi
- удобное приложение
Минусы:
- относительно небольшой аккумулятор
- может «заблудиться» в помещении
- система построения карты оставляет желать лучшего
Ремонт коробки «робот» в Екатеринбурге
Выберите Ваш город
- Ремонт АКПП
- Москва
- Санкт-Петербург
- Новосибирск
- Екатеринбург
- Нижний Новгород
- Казань
- Краснодар
Ремонт АКПП Вашего Авто под ключ с гарантией от 1 года
Роботизированная коробка по качеству работы не уступает обычной коробке-автомат, а по стоимости намного дешевле. По своей конструкции такая коробка похожа на механическую, только за включение сцепления и переключение передач здесь отвечает автоматика. Ремонт коробки «робот» похож на механические коробки, за исключением таких моментов, как восстановление системы датчиков и электронных приводов, которые выходят из строя нечасто. Доверять восстановление такого устройства необходимо специалистам.
По своей конструкции такая коробка похожа на механическую, только за включение сцепления и переключение передач здесь отвечает автоматика. Ремонт коробки «робот» похож на механические коробки, за исключением таких моментов, как восстановление системы датчиков и электронных приводов, которые выходят из строя нечасто. Доверять восстановление такого устройства необходимо специалистам.
Почему нужно обратиться к нам
Отремонтировать роботизированную коробку передач с двумя сцеплениями могут наши мастера, имеющие специальное оборудование и опыт проведения таких работ. Мы решаем такие проблемы, как:
- частое включение лампочки, информирующей о неисправности коробки;
- вытекание жидкости из коробки, которая скапливается в виде маслянистых лужиц под днищем авто;
- рывки при переключении передач, появляющиеся даже при плавном разгоне;
- возникновение странных звуков при работе коробки;
- машина не реагирует на переключение передач;
- сцепление пробуксовывает;
- остановка автомобиля в результате резкого отключения трансмиссии.


Всё это требует ремонт коробки «робот».
Как проводится восстановление
Отремонтировать роботизированную коробку передач с двумя сцеплениями удобно, так как мастера сделают всё на должном уровне. Нужно пройти несколько этапов ремонта:
- проведение первостепенной диагностики, складывающейся равно как с компьютерного контроля, а также механической проверки;
- демонтирование коробки согласно инструкции техкарты производителя;
- промывка коробки чистящими жидкостями;
- специалист в присутствии клиента проводит расчёт, согласовывает необходимые мероприятия и их стоимость;
- осуществление требуемых услуг ведется в протяжение конкретного периода времени, в зависимости от сложности работ;
- установка коробки передач;
- проведение диагностики во всех режимах работы машины.
Ремонт коробки «робот» будет сделан на должном уровне специалистами своего дела качественно и быстро.
Как с нами связаться
Отремонтировать роботизированную коробку передач с двумя сцеплениями можно в нашем сервисном центре. Следует оставить заявку и специалист с вами свяжется. По окончании работ клиент получает советы по техобслуживанию. Заполняйте заявку на сайте, и мы с радостью поможем восстановить работоспособность вашего автомобиля в кратчайшие сроки по приемлемой стоимости.
Следует оставить заявку и специалист с вами свяжется. По окончании работ клиент получает советы по техобслуживанию. Заполняйте заявку на сайте, и мы с радостью поможем восстановить работоспособность вашего автомобиля в кратчайшие сроки по приемлемой стоимости.
Прайс-лист на услуги нашего сервиса в Екатеринбурге
| Услуга | Стоимость работ |
|---|---|
| Механическая диагностика АКПП | Бесплатно |
| Электронная диагностика АКПП | Бесплатно |
| Полный ремонт АКПП | от 4 000 руб |
| Снятие АКПП | от 3.000 руб |
Смотреть весь прайс
Остались Вопросы?
Задайте их мастеру по ремонту
Видео
ВИДЕТЬ, ЕСЛИ ВЕРИТЬ
Отделка дерева
Самообучающаяся карусель Lesta — ящики
Самообучающаяся карусель — стулья
Карусель для 3D-сканирования — панели
Самообучающаяся карусель — стулья
Карусель для 2D-сканирования — коробки
Карусель для 2D-сканирования — коробки
Автономное программирование и моделирование
2D-сканирование — дверь с вращением Arial на конвейере
Самообучающаяся карусель — мебель (режим обучения)
Самообучающаяся карусель — мебель (автоматический режим)
Lesta 2D Scan Carousel — Панели
Самообучающийся робот для покраски и отделки
LestaUSA Посмотреть в действии
Рисовать стало проще с LestaUSA
Lesta MV Режим робота из порошкового металла — так просто!
Lesta MV Режим самообучения для жидкой окраски металла на сталелитейном заводе DeGeest
Леста М.
 В. Робот для окраски металла жидкой краской Художник по зеркалированию на сталелитейном заводе DeGeest
В. Робот для окраски металла жидкой краской Художник по зеркалированию на сталелитейном заводе DeGeest
Нанесение порошкового покрытия
Нанесение порошкового покрытия Lesta MV на большой цилиндр
Lesta MV Обучение работе с порошковыми металлами до и после
Lesta MV Режим самообучения из порошкового металла — так просто!
Нанесение порошкового покрытия Lesta MV на сложные рамы
Нанесение порошкового покрытия Lesta MV на большую глубокую коробку
Режим производства порошкового покрытия Lesta MV на детализированных каркасах
Lesta MV Порошковое покрытие Режим самообучения на детализированных рамах
Lesta MV Режим самообучения из порошкового металла
Lesta MV Ящик из порошкового металла
Применение жидкой окраски
Lesta MV Нанесение жидкой краски на металлические детали различных размеров
Lesta MV Жидкая окраска Металлическая кабина
Lesta MV Жидкая краска для металла Клиент Bronzoni Motors
Леста М.
 В. Жидкая окраска металла Сложная сварка
В. Жидкая окраска металла Сложная сварка
Леста М.В. Жидкая окраска металла Большая сварная деталь
Lesta MV Жидкая покраска Металлический большой шкаф
Lesta MV Жидкая покраска металла Роботизированная отделка День первый в НИЗКОМ положении на сталелитейном заводе DeGeest
Lesta MV Нанесение жидкой краски на пластик
Lesta MV Жидкая окраска металла Режим роботизированной окраски металла на сталелитейном заводе DeGeest
Lesta MV Жидкая окраска с вращением направляющей и детали
Леста М.
 В. Жидкая окраска металла Телескопическое движение
В. Жидкая окраска металла Телескопическое движение
Lesta MV Жидкая окраска металла с вращением детали
Lesta MV Жидкая окраска металла Часы маляра в режиме самообучения
Lesta MV Жидкая краска для металла – теперь наблюдайте за роботом, отражающим движения человека
Леста М.В. Маляр по жидкой окраске металла, зеркальное отображение больших сварных деталей на сталелитейном заводе DeGeest
Леста М.В. Жидкая покраска Металлический робот, зеркально отображающий маляр на сталелитейном заводе DeGeest
Леста М.
 В. Жидкая картина металла человеческого движения круглые шестерни
В. Жидкая картина металла человеческого движения круглые шестерни
Lesta MV Жидкая окраска металлических деталей круглой формы
Lesta MV Двойные роботы для жидкой окраски металла
Lesta MV Жидкая краска для деревянной рамы
Леста М. В. Жидкая картина Деревянные стулья Карусельное вращение
Больше приложений для финишной обработки
Самопрограммируемое сканирование Lesta MV для нанесения жидкой краски на дерево
Самопрограммируемое роботизированное приложение LestaUSA Suction Blow Off
Lesta MV Применение стекловолокна
Применение стекловолокна Lesta MV
Принадлежность для очистки наконечника пистолета Lesta
АВТОМАТИЗИРОВАННАЯ ПОКРАСКА И ОБРАБОТКА
НЕ ВАШ ТИПИЧНЫЙ РОБОТ
Посмотрите, как работает новейший робот-штабелер от Boston Dynamics — видео
Посмотрите, как работает новейший робот-штабелер от Boston Dynamics
06:14 900 Сейчас
Наука
Докладчик 1: Познакомьтесь с Stretch, новейшим изданием семейства Boston Dynamics и роботом, который может вызвать удивление у миллионов складских рабочих по всему миру. Всегда интересно рассказать вам о новом роботе от Boston Dynamics. Это, конечно, компания, которая принесла нам точечного робота, вдохновила на создание эпизода с черным зеркалом и познакомила мир с ядром робота. [00:00:30] Последнее творение компании не является ни четвероногим, ни одаренным спортсменом. Его мир — это ящики и склады. Итак, сегодня я хочу поговорить с вами о магазине, о том, что он может делать, как он был построен и почему он может быть тем промышленным роботом, которого компании ждали, когда Boston Dynamics представила миру растяжку с эпизодическим появлением самого узнаваемого робота компании. , [00:01:00] Boston Dynamics называет Stretch своего первого коммерческого робота, специально разработанного для складских помещений и распределительных центров. Типичный
Спикер 2: День в жизни стрейч, ну, может быть, провести утро на входной стороне склада, разгружая коробки с грузовиков. Он может провести полдень в проходах склада, собирая поддоны, которые отправятся к розничным продавцам или центрам электронной коммерции. Э-э, и он мог бы проводить вечера, загружая коробки обратно в грузовики.
Он может провести полдень в проходах склада, собирая поддоны, которые отправятся к розничным продавцам или центрам электронной коммерции. Э-э, и он мог бы проводить вечера, загружая коробки обратно в грузовики.
Спикер 1: Это Кевин Бланко [00:01:30], потому что он ведущий инженер проекта по растяжке в Boston Dynamics. У меня была возможность поговорить с ним о том, как работает его робот для штабелирования поддонов. Итак, сначала поговорим о компонентах. Здесь можно поговорить о трех компонентах. Есть рука, основание и маска восприятия. Начнем с руки. Он должен быть в состоянии поднять 50 фунтов. Это самая тяжелая коробка или поддон, которые вы найдете на складах по всей стране. Это
Спикер 2: Должна быть сильная рука с большой скоростью и большим размахом. Теперь [00:02:00] вы можете купить такие промышленные роботы-манипуляторы, но они тяжелые. Итак, мы знали, что для того, чтобы на самом деле упаковать нас в мобильного робота, нам нужно что-то намного более легкое. Поэтому мы сами разработали руку.
Спикер 1: Кевин говорит, что растягивающаяся рука весит около четверти веса эквивалентной промышленной руки, что позволило им спроектировать относительно небольшую мобильную базу. Это в основном размер поддона. Это означает, что растяжение действительно может быть везде, где может поддон. База движется на четырех разнонаправленных колесах, управляемых независимо друг от друга.
Спикер 2: Если вы думаете о самом распространенном [00:02:30] колесном транспортном средстве, которым, вероятно, является ваша машина, она может двигаться, вы знаете, вперед и назад. Он может немного поворачиваться, но это немного ограничено по сравнению с тем, что может делать растяжение, потому что оно управляет всеми колесами независимо и может двигаться вперед и назад. Он может перемещаться из стороны в сторону. Может вращаться на месте
Спикер 1: К другому концу руки подсоединен этот захват. На самом деле это набор присосок, соединенных с вакуумом. В наши дни это не обязательно новая технология, но Кевин говорит, что они работают над новым интеллектуальным захватом. Это упаковано с датчиками. Нет
Это упаковано с датчиками. Нет
Спикер 2: Один готов [00:03:00], что-то вроде этого, прежде чем разорвать плоскую коробку. Это идеально. Когда захваты точно соответствуют размеру, это не так уж сложно, верно? Гм, но когда вы сталкиваетесь с большим количеством коробок, от очень маленьких до очень больших, или коробками, у которых есть отверстия в верхней части, иногда даже по дизайну, или коробками, которые, может быть, может быть, они не коробки, может быть, это лотки с напитки, которые имеют термоусадочную пленку вокруг верхней части, действительно нерегулярны, это своего рода новый рубеж для всасывания
Спикер 1: Хватание. Наконец, у вас есть маска восприятия. Это тот столб, торчащий рядом с рукой. Это наполнено такими вещами, как датчики глубины и [00:03:30] 2D-камеры. Вот как растягивание идентифицирует коробки разных размеров и форм.
Спикер 2: Мы также используем эти камеры для всех других вещей, которые действительно позволяют вам быть автономными. Так они обнаруживают препятствия. Мы можем локализовать или, вы знаете, растяжка может определить, где он находится на складе, и он может, может выполнять все необходимые задачи восприятия. Так что этот стрейч может автономно перемещаться по складу.
Мы можем локализовать или, вы знаете, растяжка может определить, где он находится на складе, и он может, может выполнять все необходимые задачи восприятия. Так что этот стрейч может автономно перемещаться по складу.
Спикер 1: Если это звучит знакомо, возможно, это связано с тем, что система машинного зрения Stretch во многом основана на других роботах из бостонской динамической точки [00:04:00] из этого списка. И это еще не все, что объединяет этих роботов.
Спикер 2: Это одна из причин, по которой мы смогли построить растяжку довольно быстро, потому что мы, мы, вы знаете, мы позаимствовали у многих существующих роботов, но если вы посмотрите на запястья при растяжке, это то же самое электрическое. мотор, та же коробка передач, те же датчики и даже та же, знаете ли, программа для управления ею при попадании спотов. Итак, мы можем брать строительные блоки из всех наших других роботов и быстро создавать прототипы, например, растягивать. В
Спикер 1: На самом деле, растяжение действительно является прямым потомком во многих [00:04:30] отношениях от робота Atlas, начиная с 2016 года, когда Boston Dynamics выпустила это видео о подъеме объектов Atlas, они начали вызывать интерес у компаний, желающих заставить Atlas работать на своих складах,
Спикер 2: Как мы и думали, Атлас, вероятно, немного сложен для работы на складе. Но мы можем, мы могли бы что-нибудь придумать. Это намного проще, меньше соединений, например, это могло бы работать на складе и все еще иметь рекламу, вы знаете, атрибуты Атласа, которые, как вы знаете, у Атласа имеют приятную маленькую площадь. Он может поместиться в ограниченном пространстве, но все же может поднимать тяжелые предметы.
Но мы можем, мы могли бы что-нибудь придумать. Это намного проще, меньше соединений, например, это могло бы работать на складе и все еще иметь рекламу, вы знаете, атрибуты Атласа, которые, как вы знаете, у Атласа имеют приятную маленькую площадь. Он может поместиться в ограниченном пространстве, но все же может поднимать тяжелые предметы.
Спикер 1: Это привело команду к разработке робота с ручкой [00:05:00]. Впервые представленный миру год спустя, в 2017 году, после тестирования ручки с несколькими клиентами они поняли, что им нужно что-то большее.
Спикер 2: Маневренный. Если вы когда-нибудь были в кузове грузовика или грузового контейнера, особенно для крупного робота там довольно тесно. Э-э, и это было для нас открытием, вы знаете, ручка могла выгрузить все ящики в грузовике, но это заняло некоторое время, потому что ему нужно было так много маневрировать, чтобы избежать столкновений. Все это время мы думали, ладно, есть еще один робот, который выглядит как растяжка, которого мы годами рисовали на чертежной доске.