Содержание
5 лучших моторов для тюнинга всех времен
1 ноября 2018, 13:25:44
Настоящие автофаны знают — лучшие моторы не те, что выигрывают награды вроде «Двигатель года», а те, что лучше всего поддаются доводке. В наше время совершенно не обязательно покупать Porsche, чтобы иметь под капотом 500 сил. Хотите больше? Это можно устроить, не прибегая к покупке Bugatti Veyron, тем более, что все самые доступные и распространенные для тюнинга агрегаты давно известны и не стоят космических денег.
Honda B-Series
Начиная с 90-х годов, моторы B16 и B18 в различных модификациях считаются самыми надежными в истории Honda. Компактные 4-цилиндровые движки могли выдавать большую мощность без всяких турбонаддувов и крутиться почти до 9 тысяч оборотов! К примеру, 1,6-литровый мотор, который в середине 90-х ставили на хэтчбек Civic и купе Integra, выдавал целых 168 сил! А его заряженная модификация для версии Type R и вовсе могла похвастаться отдачей в 187 «лошадок». При этом, 1,6-литровый мотор был лишен фирменной системы VTEC, которая задействовала на высоких оборотах дополнительные клапаны в ГБЦ. А вот «старший брат» B18C стал настоящим ураганом — опять же без всяких турбин 1,8-литровый мотор мог выжать 200 «лошадей», что было более чем достаточно для легких и отлично рулящихся спорткаров Honda.
При этом, 1,6-литровый мотор был лишен фирменной системы VTEC, которая задействовала на высоких оборотах дополнительные клапаны в ГБЦ. А вот «старший брат» B18C стал настоящим ураганом — опять же без всяких турбин 1,8-литровый мотор мог выжать 200 «лошадей», что было более чем достаточно для легких и отлично рулящихся спорткаров Honda.
Subaru EJ20
Знаменитый оппозит Subaru, выпускавшийся до 2005 года, оказался даже надежнее, чем его преемник EJ25. Более толстые стенки цилиндров и иная рубашка охлаждения позволяла ему легче переносить повышение мощности, которого с EJ20 весьма легко добиться. В атмосферном варианте мотор развивал невыдающиеся 150 лошадиных сил, зато в комплекте с одной турбиной 2-литровый движок мог порадовать владельца 260–300 «конями». Этот агрегат ставился практически на все автомобили Subaru, включая все версии Impreza и заряженные японские комплектации Legacy. Мотор имел множество модификаций, которые, однако, славились своей надежностью и неприхотливостью. А для версии STI движок и вовсе с завода оснастили кованными поршнями, хотя в индексе агрегата это никак не отражалось.
А для версии STI движок и вовсе с завода оснастили кованными поршнями, хотя в индексе агрегата это никак не отражалось.
Nissan RB26DETT
Любители «Форсажа» уже нервно потирают ладошки в предвкушении характеристик этого мотора. Он из совершенно другой лиги, нежели первые две строчки нашего рейтинга, которым только снится 1000 л.с. Рядная «шестерка» от Nissan выпускалась в объемах 2, 2,5 и 2,6 литра, однако наибольшую известность получил мотор RB26DETT c двумя турбинами от Nissan Skyline GT-R R34. Согласно японскому законодательству, выпускать автомобили мощнее 280 лошадиных сил на внутренний рынок просто запрещено. Поэтому формально Skyline имел по паспорту именно такую мощность. В реальности же замеры показывали порядка 320 «коней», а небольшой чип-тюнинг с легкостью превращал эту цифру в 600. 1000 сил также доступна с небольшой переделкой поршневой группы под кованные детали.
Toyota 2JZ-GTE
Главный противник ниссановского мотора во всех гоночных разборках и, пожалуй, самый тюнингуемый в мире мотор. Также, как и его соперник, формально выдавал 280 «лошадей», но в реальности легко раздувается до 700. 3-литровый мотор на 6 цилиндров с одной турбиной ставился практически во все мощные Toyota, от заряженных Mark2 и Chaser до купе Supra и некоторых моделей Lexus. Конструкция мотора такова, что слабыми местами движка можно назвать только привод ГРМ ремнем, шкив коленвала и прокладку масялного насоса. Чугунный блок с легко держит мощность до 2 тысяч лошадиных сил, а ГРМ, масляный насос и система охлаждения рассчитаны на тысячу «коней». Это делает 2JZ один из самых любимых моторов в дрифтинге, дрэг-рейсинге и уличных гонках.
Также, как и его соперник, формально выдавал 280 «лошадей», но в реальности легко раздувается до 700. 3-литровый мотор на 6 цилиндров с одной турбиной ставился практически во все мощные Toyota, от заряженных Mark2 и Chaser до купе Supra и некоторых моделей Lexus. Конструкция мотора такова, что слабыми местами движка можно назвать только привод ГРМ ремнем, шкив коленвала и прокладку масялного насоса. Чугунный блок с легко держит мощность до 2 тысяч лошадиных сил, а ГРМ, масляный насос и система охлаждения рассчитаны на тысячу «коней». Это делает 2JZ один из самых любимых моторов в дрифтинге, дрэг-рейсинге и уличных гонках.
General Motors LS-Series
На вершине нашего рейтинга самый компактный и надежный V8 в мире из Америки. Этот мотор вместе с коробкой передач весит всего 240 килограммов отличается нереальной надежностью. А все благодаря своей гениальной конструкции с минимумом наворотов — все навесное уже установлено на моторе, а все самые уязвимые составляющие усилены с завода. Самое популярное поколение движка LS3 при объеме в 5,7 литра выдает 525 лошадиных сил без всяких усилий. Нижневальная система и множество готовых комплектов под тюнинг и установку компрессора позволяют с минимумом затрат выжимать из этого «малыша» по 1,5 тысячи «лошадок». Самые мощные версии мотора ставились на Corvette, а также засветились в огромном количестве дрифт-каров по всему миру. К тому же, это единственный мотор, который до сих пор можно купить отдельно новым из коробки и поставить в любое авто.
Самое популярное поколение движка LS3 при объеме в 5,7 литра выдает 525 лошадиных сил без всяких усилий. Нижневальная система и множество готовых комплектов под тюнинг и установку компрессора позволяют с минимумом затрат выжимать из этого «малыша» по 1,5 тысячи «лошадок». Самые мощные версии мотора ставились на Corvette, а также засветились в огромном количестве дрифт-каров по всему миру. К тому же, это единственный мотор, который до сих пор можно купить отдельно новым из коробки и поставить в любое авто.
Автор: Фёдор Борисов
Использование текстов, фото- и видео сайта разрешается только с указанием активной гиперссылки.
7564
Тюнинг ателье KMS Kovalchuk Motor Sport
Профессиональный подбор, установка, настройка амортизаторов, пружин и комплектов подвески.
Сервисное
сопровождение. Гарантия на работы.
О компании
К
КMS — самый новаторский подвесочный центр России.

Более 15 лет KMS занимается ремонтом амортизаторов, установкой, настройкой и разработкой лучших
решений по
подвескам.
В базе решений компании огромный опыт работы с механическими и электронно-управляемыми подвесками
всех
мировых лидеров.
KMS — официальный представитель Reiger, JRZ, H&R, Bilstein, Tractive, AST, Merwede Springs, EBC
Brakes,
DSC
Sport на территории РФ и СНГ.
Механики команды KMS прошли профессиональное обучение у производителей.
Мы работаем только с сертифицированной продукцией.
Р
Решения для города
Идеальная управляемость автомобиля и комфорт при ежедневных поездках в городе и на трассе – это не миф.
KMS
предлагает решения по настройке и установке амортизаторов на гражданские автомобили.
Заводские подвески даже самых дорогих автомобилей зачастую требуют доработки. Штатные амортизаторы в
Штатные амортизаторы в
условиях активной эксплуатации в нынешних дорожных условиях выходят из строя раньше времени или быстро утрачивают
характеристики, обеспечивающие комфорт пассажиров.
Получить консультацию
И мы подберем лучшие подвесочные решения
Спорт
С
Спорт
Если ваша цель победа и вы понимаете ценность каждой доли секунды — вы правильно зашли. Мы знаем, что
такое автоспорт! Мы поможем найти скорость и в кольце, и в ралли.
Лучший результат дает максимальное ускорение на выходе из каждого поворота, а это правильный баланс, точная управляемость и максимальная тяга на колёсах, всё то, что дает вам идеально настроенная подвеска.
Команда профессионалов, во главе с чемпионом России по ралли и мастером спорта – Алексеем Ковальчуком,
гарантирует профессиональную установку и настройку амортизаторов.
Настройка под любой трек и трассу
Настройка оптимального соотношения усилий сжатия и отбоя
Точная финальная настройка с учетом покрытия и погодных условий
Профессиональный ребилд амортизаторов
Услуги
KMS
Наши услуги
Ознакомить вас с полным перечнем услуг и товаров, а также ответить на вопросы мы можем по телефону и
электронной почте.
Подбор
Разработка
Установка
Настройка
Сервис
Получить консультацию
И мы подберем лучшие подвесочные решения
Акции
А
Акции и специальные предложения
Автозапчасти по специальным условиям для клиентов компании KMS TUNING.
-10% на контроллеры DSC
Вторичка! Комплект адаптивной подвески для G-class
Распродажа от H&R. Скидки до 50%
Смотреть все акции
Блог
Н
Новости и события
Хотите узнать что такое мир автоспорта? Разобраться в подвесках и быть в курсе последних мировых
разработок в области тюнинга автомобилей поможет наш БЛОГ.
Пружины с занижением H&R 28787-1 для BMW i8
307.09.2022
Пружины с занижением H&R 28599-1 Hyundai Kona N
307.09.2022
Винтовая подвеска H&R 28619-1 для Toyota Yaris GR
307.09.2022
Смотреть все статьи
Получить консультацию
И мы подберем лучшие подвесочные решения
Ваше сообщение отправлено. Мы свяжемся с вами в течение 2х часов
Произошла ошибка. Сообщение не отправлено.
Отзывы
НР
Наши работы
Это лишь несколько наших клиентов, которые воспользовались нашими услугами.
Стань одним из них
×
Заказать звонок
Ваше сообщение отправлено. Мы свяжемся с вами в течение 2х часов
Произошла ошибка. Сообщение не отправлено.
Нажимая на кнопку «Заказать», вы даете согласие на обработку персональных данных
Настройка серводвигателя
— ракетостроение или прогулка в парке?
В этой статье мы даем обзор настройки серводвигателя на основе ПИД-регулятора (пропорционального, интегрального и дифференциального) и представляем два метода ручной настройки, которые хорошо работают для большого количества систем. Мы также показываем, что «оптимальные» параметры различаются в зависимости от приложения и целей производительности даже для одних и тех же настроек двигателя и усилителя.
Мы также показываем, что «оптимальные» параметры различаются в зависимости от приложения и целей производительности даже для одних и тех же настроек двигателя и усилителя.
История о двух серводвигателях
Существует два типа серводвигателей, обычно используемых для позиционирования: щеточный двигатель постоянного тока, в котором для коммутации двигателя используются механические щетки, и бесщеточный двигатель постоянного тока, также известный как двигатель BLDC, также известный как Синхронный двигатель переменного тока, также известный как двигатель с постоянными магнитами, который электронно коммутируется внешней схемой.
В отличие от шаговых двигателей, которые перемещаются с дискретными шагами положения, серводвигатели не имеют встроенного определения того, где они находятся, и поэтому для управления их положением требуется устройство обратной связи, такое как квадратурный энкодер.
Контур сервопривода (технически контур сервопривода положения) предназначен для перемещения двигателя в определенное место. Он делает это, сравнивая требуемое положение от генератора траектории в любой момент с фактическим положением двигателя и применяя непрерывную корректирующую команду двигателя.
Он делает это, сравнивая требуемое положение от генератора траектории в любой момент с фактическим положением двигателя и применяя непрерывную корректирующую команду двигателя.
Сервосхемы требуют, чтобы параметры усиления устанавливались пользователем для соответствия различным нагрузкам машины и условиям работы. Чем оптимальнее настроены эти параметры, тем точнее мотор будет отслеживать нужное положение при различных профилях движения.
I ПИД-регулятор, следовательно, я
Теоретики и инженеры разработали ряд схем компенсации сервоприводов за многие годы, но подавляющим фаворитом для позиционирования двигателя является ПИД-контур, что означает «пропорциональный, интегральный, производный».
Как выяснилось, существует несколько различных реализаций цифрового контура ПИД, и эти контуры ПИД подключаются к усилителям разных типов. Чтобы обосновать обсуждение, мы сосредоточимся на контуре положения ПИД-регулятора, показанном на рисунке 1, и подключим выход этого контура к усилителю в режиме крутящего момента, также называемому усилителем в режиме тока. На сегодняшний день это наиболее распространенная общая конфигурация ПИД-регулятора положения и стандартного усилителя.
На сегодняшний день это наиболее распространенная общая конфигурация ПИД-регулятора положения и стандартного усилителя.
Рис. 1: ПИД-регулятор положения
Для контура положения ПИД-регулятора необходимо определить три значения: пропорциональный коэффициент усиления (Kp), интегральный коэффициент усиления (Ki) и дифференциальный коэффициент усиления (Kd). Современные поставщики движений предоставляют множество дополнительных опций, в том числе ограничение интеграла, программируемое время производной, коэффициенты прямой связи, смещение двигателя, фильтры зоны нечувствительности и фильтрацию в частотной области, такую как режекторные фильтры или полосовые фильтры. Некоторые из этих концепций будут рассмотрены позже.
Что такое PID и что на самом деле означают эти термины? Причина, по которой ПИД-контур так популярен, заключается в том, что его составные части, P, I и D, можно описать и понять интуитивно.
Член P называется пропорциональным членом, потому что он обеспечивает пропорциональную восстанавливающую коррекцию выходной команды усилителя. При представлении ошибки сервопривода, которая для контура положения представляет собой разницу между желаемым (управляемым) положением и фактическим (измеренным) положением, член P действует как пружина. Чем больше ошибка положения сервопривода, тем больше корректирующая команда восстановления двигателя.
При представлении ошибки сервопривода, которая для контура положения представляет собой разницу между желаемым (управляемым) положением и фактическим (измеренным) положением, член P действует как пружина. Чем больше ошибка положения сервопривода, тем больше корректирующая команда восстановления двигателя.
Член I является интегральным (или интегрированным) членом, поскольку он интегрирует во времени ошибку сервопривода положения. Почему это может быть полезно? Поскольку, если доступен только термин P (пропорциональный), может быть трудно достичь точного заданного положения из-за сил или механических проблем, таких как сила тяжести, заедание, блокировка двигателя или другие факторы. Член I накапливается со временем и может привести сервопривод «через горб» в конечное желаемое положение.
Вклад члена D вычисляется путем вычитания предыдущей ошибки сервопривода из текущей ошибки положения сервопривода. Он имеет два основных практических эффекта; он обеспечивает усиление прямой связи всякий раз, когда скорость профиля увеличивается или уменьшается, и обеспечивает коэффициент сопротивления общего назначения, тем самым подавляя колебания.
Поворот ручки на «11»
Итак, как лучше установить эти значения? Начнем с того, что стало, без сомнения, наиболее распространенным подходом к быстрой настройке контура положения. Называемый методом пошаговой реакции, этот подход основан на реакции двигателя на мгновенное изменение заданного положения (шага).
Чтобы заставить этот метод работать, или, если уж на то пошло, любой метод ручной настройки, нам нужно средство отслеживания положения для отображения результатов наших перемещений.
Как минимум, нам нужно отобразить желаемое положение (положение, заданное генератором траектории) и фактическое положение (фактическое измеренное положение двигателя). На рис. 2 показан пример снимка экрана такой системы трассировки, в данном случае относительно сложной системы трассировки, предоставляемой программным обеспечением PMD Pro-Motion® . Вы можете использовать этот или аналогичный сторонний продукт, что-то, что вы разрабатываете сами, или теоретически вы можете даже просто использовать осциллограф.
Рисунок 2: Средство отслеживания желаемого и фактического положения
Если возможно, вы также хотите отобразить команду двигателя (заданное значение крутящего момента для выхода усилителя контуром ПИД), потому что для всех этих процедур мы хотим избегайте запуска двигателя с насыщенной командой. Насыщение вызывает заводнение и, следовательно, искажает точность наших значений PID.
Вот основной подход, используемый для настройки переходной характеристики:
- Инициализируйте параметры I и P равными нулю и установите параметр D равным небольшому ненулевому значению
- Увеличивайте P от нуля до тех пор, пока система не выйдет за пределы диапазона и не покажет недостаточно демпфированную реакцию
- Увеличивайте D до тех пор, пока колебания не станут «критически затухающими»
Повторяйте с шага 2 и увеличивайте P и D до тех пор, пока не найдете самые высокие практические значения, которые все еще могут генерировать движение с критическим демпфированием
На рисунках 3a, 3b и 3c показаны приблизительные следы переходных характеристик с недостаточным, избыточным и критическим демпфированием.
Рис. 3a: Переходная характеристика с недостаточным демпфированием
Рисунок 3b: Реакция на скачок с избыточным демпфированием
Рис. 3c: Реакция на скачок с критическим демпфированием
вы можете отступить на P и D, чтобы успокоиться. Чуть позже мы поговорим о подходах «получить свой пирог и съесть его», когда речь идет о том, чтобы придать двигателю наибольшую «крутизну» сервопривода, сохраняя при этом тихий двигатель.
Мое королевство за маленькую ошибку расчета
Очевидно, что в этом обсуждении отсутствует Ki, интегральный коэффициент усиления. Этот срок вычисляется из суммы текущей и всех предыдущих ошибок сервопривода.
Как мы должны установить этот «исторический» параметр выхода PID? Прежде всего, мы хотим, чтобы интегральный член был как можно меньше. Это связано с тем, что историческое завершение является прямым фактором нестабильности сервопривода или, как выражается в терминах сервоанализа, потери запаса по фазе.
С другой стороны, использование интегрального члена может устранить последний бит ошибки в системе, часто доводя ошибку сервопривода до +/- 1 такта или даже до нуля импульсов для конечного положения двигателя. Таким образом, некоторое количество Ки может принести большую пользу для точности нашей системы.
В дополнение к настраиваемому пределу Ki, коммерческие контроллеры обеспечивают настраиваемый интегральный предельный показатель, или сокращенно Ilim. Илим ограничивает общий вклад интегрального члена, эффективно уменьшая его «память». Это очень полезная функция для уменьшения перерегулирования, которое может произойти из-за зависания.
Хороший начальный подход состоит в том, чтобы максимальный вклад члена I (Ki и Ilim, работающие вместе) составлял 10-25% от максимального вклада члена P (пропорционального). Чтобы во всем этом разобраться, вам, возможно, придется обратиться к руководству вашего контроллера или немного поэкспериментировать, чтобы увидеть, как Kp, Ki и Ilim влияют на выходную команду двигателя.
Нам нужно обойти
Вы можете потратить некоторое время на повторение значений P, D и I, но это не займет много времени, чтобы почувствовать эффект изменения параметров — когда вы должны увеличить, когда вы должны вернуться выключено, и когда вы достигли пика. К сожалению, бывают случаи, когда вы гоняетесь за своим хвостом. Увеличение D приводит к изменению оптимального значения P, что, в свою очередь, приводит к изменению оптимального значения D и т. д.
Почему это происходит? Ответ связан с тем, как перекрываются частотные области различных терминов P, I и D. Члены с более высокими частотами, особенно производный член, влияют на все частоты от низких до высоких. Низкочастотные термины, такие как интеграл, влияют только на низкую частоту. А П где-то посередине.
Для настройки таким образом, чтобы свести к минимуму эти взаимодействия, было бы лучше, если бы мы могли сначала настроить высокочастотную составляющую, затем перейти к значению среднего диапазона и закончить низкочастотной частью.
Вы находитесь в зоне
Это именно то, что делает «настройка на основе зон», второй метод ручной настройки, который мы представим. «На основе зон» относится к частотным зонам терминов P, I и D и взято из превосходной книги Джорджа Эллиса «Руководство по проектированию систем управления», выходящей уже в четвертом издании.
Так как же это работает? В этом методе мы строим зависимость скорости от времени, и желаемый профиль будет ступенчатой функцией скорости (а не положения). Вот подход шаг за шагом:
- Установите профиль таким образом, чтобы он мгновенно ускорялся между нулевой и фиксированной скоростью и возвращался к
- Оставив члены P и I равными нулю, увеличивайте D до тех пор, пока график фактического профиля скорости не будет точно соответствовать желаемому профилю скорости. Не беспокойтесь о том, совпадают ли позиции назначения, на данном этапе вы только исследуете различия в скорости (ошибку скорости). На рис. 4 показана репрезентативная хорошо настроенная скорость в зависимости от времени.

- Теперь настройте свой профилировщик так, чтобы вы использовали движения с ускорениями и скоростями, типичными для вашего приложения, и измените средство захвата, чтобы оно отображало желаемое положение, фактическое положение и ошибку положения.
Увеличивайте P до тех пор, пока ошибка сервопривода не будет минимизирована. В какой-то момент, когда вы увеличиваете P, движение может иметь сильное превышение или стать нестабильным, и в этот момент вы должны уменьшить это значение как минимум на 25% для окончательного значения.
- Как и прежде, доработать, введя интеграл, необходимый для посадки двигателя с требуемой точностью, но не настолько, чтобы ввести

Зональная настройка имеет ряд преимуществ по сравнению с настройкой переходной характеристики. Во-первых, он менее итеративен, поскольку настраивает параметры ПИД-регулятора в порядке частотной характеристики. Таким образом, он должен быстрее приходить к набору параметров управления. Во-вторых, это позволяет вам использовать реальные профили движения с рампами, а не нереалистичные мгновенные скачки положения.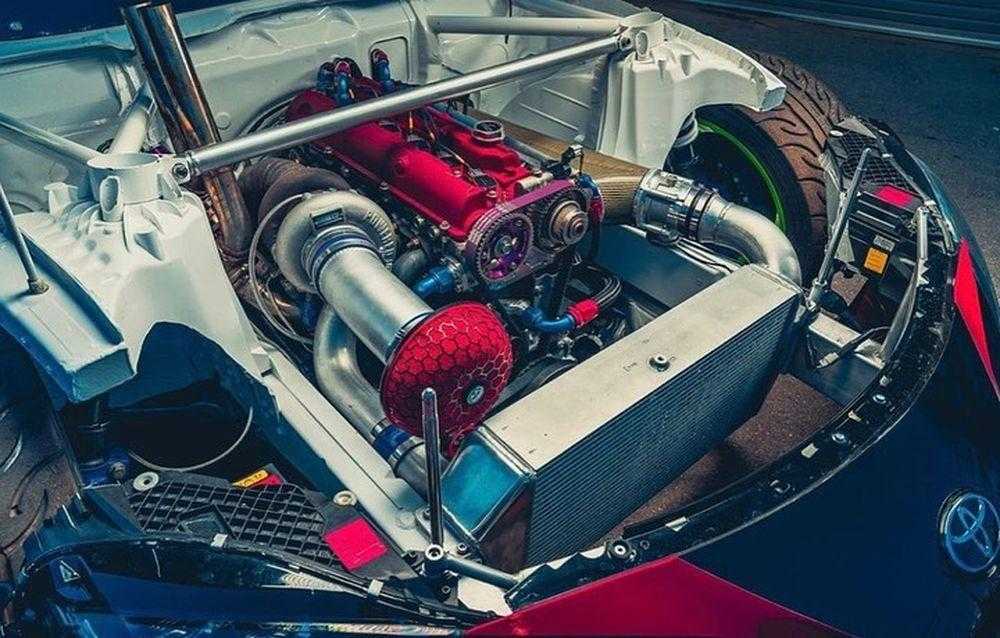
Рис. 4: Настройка на основе зон
Во всех случаях, независимо от того, используется ли ступенчатая характеристика или ручная настройка на основе зон, проверьте движение как в положительном, так и в отрицательном направлении, чтобы убедиться, что параметры усиления хорошо работают в обоих направлениях. .
Сохраняйте реальность
Было бы ошибкой полагать, что один набор параметров ПИД-регулятора оптимизируется для всех применений системы управления движением. Некоторые системы должны иметь очень безопасные, консервативные параметры сервопривода. Другие могут иметь агрессивные параметры, которые оптимизируют определенную характеристику, такую как время передачи от точки к точке. Другие подчеркивают очень маленькие ошибки во время движения, а третьи должны работать без слышимого шума.
Вас также может заинтересовать: Шум серводвигателя и способы его устранения и замедлить нагрузку. В зависимости от механики вашей конкретной машины эти силы могут оказывать большое влияние на работу сервопривода из-за эффекта, известного как отраженная инерция. Как правило, двигатели с большим редуктором имеют относительно небольшую отраженную инерцию, а двигатели с прямым приводом или с минимальным редуктором имеют большую отраженную инерцию.
Как правило, двигатели с большим редуктором имеют относительно небольшую отраженную инерцию, а двигатели с прямым приводом или с минимальным редуктором имеют большую отраженную инерцию.
Планирование усиления — это общий термин для описания стандартного подхода к решению таких сложных условий. Общая идея состоит в том, чтобы переключать различные наборы параметров усиления, когда машина работает в разных режимах или несет разные нагрузки.
Легко увлечься планированием усиления, но, как минимум, вы можете счесть выгодным разработать более агрессивный «подвижный» набор сервоусилений и более тихий, менее агрессивный «постоянный» коэффициент усиления, используемый для удержания оси на месте . Многие контроллеры предоставляют программно доступный флаг «в движении», упрощающий запуск в этом или других условиях, таких как определенные значения положения, скорости, ускорения или времени.
Другим важным методом повышения реальной производительности является упреждение. Feedforward не оказывает динамического влияния на стабильность системы и поэтому является своего рода «бесплатным обедом» для улучшения производительности оси. Как указывалось в нашем предыдущем обзоре Torque Feedforward Deep Dive , знание веса системы или кинематики движения можно использовать для прямой подачи команды крутящего момента двигателя, которая снижает нагрузку на ПИД-регулятор, тем самым позволяя использовать менее агрессивные значения сервопривода.
Как указывалось в нашем предыдущем обзоре Torque Feedforward Deep Dive , знание веса системы или кинематики движения можно использовать для прямой подачи команды крутящего момента двигателя, которая снижает нагрузку на ПИД-регулятор, тем самым позволяя использовать менее агрессивные значения сервопривода.
Вас также могут заинтересовать: Упреждение в движении
Автонастройка в каждом потенциометре
Большинство методов ручной настройки основаны на субъективных оценках, таких как «передемпфирование» или «недостаточное демпфирование». Автоматическая настройка машины, называемая «автонастройкой», обещает сделать этот процесс более научным и, безусловно, менее трудоемким.
Методы автонастройки, как правило, используют академические методы настройки. Из них наиболее известна Zeigler-Nichols (ZN). В отличие от ручных методов, описанных выше, этот метод предполагает наличие определенной математической модели для описания контролируемого процесса, а затем выполняет тесты, которые преобразуются с помощью ряда правил в параметры ПИД-регулятора.
Однако, как мы узнали из предыдущих разделов, значения автоматической настройки, как правило, не соответствуют реальным условиям работы машины. Так что относитесь к параметрам автонастройки как к первоначальному предложению и планируйте ручную оптимизацию оттуда.
Часто задаваемые вопросы
Еще один метод повышения производительности вашей машины — частотная фильтрация. В той мере, в какой сервоконтур является системой динамического отклика, мы можем помещать различные виды фильтров на входные или выходные сигналы сервоконтура, чтобы сделать их менее подверженными колебаниям.
Наиболее распространенная реализация такого фильтра известна как биквадратный фильтр, показанный на рис. 5. При выборе правильных значений для A1, A2, B0, B1 и B2 этот фильтр может функционировать как множество функций фильтрации, включая режекторный фильтр, полосовой фильтр и фильтр высоких или низких частот.
Рисунок 5. Биквадратная фильтрация
Если вы не знакомы с использованием биквадратичного фильтра, существует ряд ресурсов, предоставляющих информацию, включая веб-сайт www. octave.org . На этом веб-сайте есть инструмент, который позволяет вам вычислять значения для A1, A2 и т. д. на основе характеристик частотной фильтрации, которые вы хотите использовать в своей системе.
octave.org . На этом веб-сайте есть инструмент, который позволяет вам вычислять значения для A1, A2 и т. д. на основе характеристик частотной фильтрации, которые вы хотите использовать в своей системе.
Для большинства инженеров, которые серьезно погружаются в схемы частотной фильтрации, такие как биквадратная фильтрация, настройки управления для этой фильтрации будут построены на основе подробной характеристики механической системы с использованием инструментов частотного анализа, таких как диаграммы Боде. Хотя эти инструменты и не для слабонервных, они легко доступны у большинства поставщиков движений и добавляют числовой анализ к тому, что в противном случае могло бы быть интуитивно понятным процессом. Графики Боде и понимание того, как их использовать и интерпретировать, являются сложной темой, выходящей за рамки этой статьи, но чтобы узнать больше, вам может быть интересна статья ниже, Механическая резонансная частота .
Вас также могут заинтересовать: Механическая резонансная частота
В порядке предосторожности будьте осторожны, чтобы не иметь нереалистичных ожиданий в отношении того, что может сделать частотный фильтр. Механика стареет и меняется со временем, а машины несколько меняются даже прямо с завода. Если вы обнаружите улучшение от режекторного фильтра или какого-либо другого фильтра, убедитесь, что это улучшение применяется в полевых условиях в реальных условиях и с течением времени.
Механика стареет и меняется со временем, а машины несколько меняются даже прямо с завода. Если вы обнаружите улучшение от режекторного фильтра или какого-либо другого фильтра, убедитесь, что это улучшение применяется в полевых условиях в реальных условиях и с течением времени.
В лабораторию!
Какой была бы хорошая статья по настройке серводвигателей без вращающихся двигателей и графиков?
Чтобы проиллюстрировать различные аспекты этой статьи, мы подключили плату Prodigy/CME к бесколлекторному двигателю постоянного тока и отобразили полученные данные с помощью программного пакета PMD ProMotion .
Ниже приведены ссылки на несколько видеороликов, демонстрирующих простое движение с недостаточным демпфированием, чрезмерным демпфированием и критическим демпфированием для одиночной оси движения без нагрузки, отвечающей на команду отклика на шаг.
 youtube.com/embed/Q1E26NjCsjQ» frameborder=»0″ data-service=»youtube»>
youtube.com/embed/Q1E26NjCsjQ» frameborder=»0″ data-service=»youtube»>
Underdamped Single Motion Axis
Overdamped Single Motion Axis
Critically Damped Single Motion Axis
PMD Products That Support Servo Двигатели
Компания PMD уже более двадцати пяти лет производит интегральные схемы, обеспечивающие расширенное управление движением щеточных и бесщеточных двигателей постоянного тока. С тех пор мы также встроили эти микросхемы в модули plug and play и платы управления движением. Несмотря на различия в упаковке, все эти продукты управляются C-Motion, простым в использовании языком управления движением PMD, и идеально подходят для использования в медицинских, лабораторных, полупроводниковых, роботизированных и промышленных приложениях управления движением.
ИС серии MC58113
ИС серии MC58113 являются частью популярного семейства ИС управления движением Magellan от PMD и обеспечивают расширенное управление положением как для шаговых двигателей, так и для щеточных двигателей постоянного тока. Стандартные функции включают автонастройку, профилирование s-образной кривой, FOC (Field Oriented Control), управление высоким/низким переключаемым сигналом, прямой энкодер, ввод импульсов и направления и многое другое. Независимо от того, используются ли они для автоматизации лабораторий, управления насосами, систем наведения или автоматизации общего назначения, семейство ИС MC58113 является идеальным решением для вашей следующей конструкции машины.
Узнать больше >>
Цифровые приводы ION
Цифровые приводы ION сочетают в себе одноосную интегральную схему Magellan IC и сверхэффективный цифровой усилитель в компактном прочном корпусе. В дополнение к расширенному управлению серводвигателем, ION обеспечивают S-образное перемещение от точки к точке, управление питанием i2T, загружаемый код пользователя и ряд функций безопасности, включая обнаружение перегрузки по току, перенапряжению и перегреву. ION — это простые в использовании устройства plug and play, которые мгновенно запустят ваше приложение.
Подробнее >>
Платы управления движением Prodigy
Платы Prodigy®/CME Machine-Controller обеспечивают высокоэффективное управление движением для медицинских, научных, автоматизированных, промышленных и роботизированных приложений. Доступные в конфигурациях с 1, 2, 3 и 4 осями, эти платы поддерживают щеточные двигатели постоянного тока, бесщеточные двигатели постоянного тока и шаговые двигатели, а также позволяют загружать написанный пользователем код на языке C и запускать его непосредственно на плате. Машинный контроллер Prodigy/CME имеет на борту Усилители Atlas , устраняющие необходимость во внешних усилителях. Для создания полностью функционирующей системы необходимы только один высоковольтный источник питания, двигатели и кабели. Варианты интерфейса хоста включают Ethernet UDP и TCP, CANbus, RS-232 и RS-485.
Узнать больше >>
Программное обеспечение Pro-Motion Analysis
Pro-Motion — это простой в использовании тренажер PMD на базе Windows и программа анализа движения. Он предлагает готовые возможности, которыми сможет поделиться вся ваша команда разработчиков. Пошаговый мастер управления осями позволяет разработчикам быстро и легко настраивать контур положения, контур тока и параметры мотора управления, ориентированного на поле. Опытные пользователи могут получить доступ к полному пакету анализа движения с построением диаграммы Боде и автоматической настройкой.
Подробнее >>
Вас также может заинтересовать:
- Механическая резонансная частота
- Мобильная и портативная автоматизация требует легкой, эффективной и прохладной работы
- Двигатели и приводы для медицинских устройств
- Улучшение перекачки жидкостей за счет оптимизированной обратной связи
- Поле-ориентированное управление (FOC) — глубокое погружение
Что такое настройка сервопривода и почему она важна?
By Danielle Collins 1 Комментарий
В отличие от шаговых двигателей, которые полагаются на четные импульсы тока для постепенного вращения двигателя, серводвигатели работают с непрерывным током для достижения заданного положения, скорости или крутящего момента. Точное количество тока, подаваемого на двигатель, определяется сервоконтроллером на основе информации, предоставленной энкодером относительно фактического состояния системы (положение, скорость или крутящий момент). Контроллер отправляет эти команды тока сервоприводу (также называемому усилителем), который подает на двигатель точный ток, необходимый для корректировки любых различий между заданным значением (положением, скоростью или крутящим моментом) и фактическим значением.
Когда мы говорим о «точности» в линейной системе, мы обычно имеем в виду точность позиционирования и повторяемость механического привода (например, винтового или ременного). Но независимо от того, насколько точна механическая система, если серводвигатель не получает надлежащую величину тока, он не может создать необходимый крутящий момент (слишком большой или слишком маленький), чтобы привести механическую систему в заданное положение.
Настройка сервопривода с помощью ПИД-контуров
Настройка сервосистемы включает регулировку коэффициентов усиления в контроллере движения, чтобы свести к минимуму время отклика сервосистемы, время установления и перерегулирование. Целью настройки сервопривода является минимизация (но не обязательно устранение) ошибки между заданным положением (или скоростью, или крутящим моментом) и достигнутым фактическим значением.
Наиболее распространенным типом контура управления или алгоритма, используемого для настройки сервопривода, является ПИД-контур, где «P» относится к пропорциональному усилению, «I» относится к интегральному усилению, а «D» относится к дифференциальному усилению. Усиление — это, по сути, отношение выходного сигнала к входному, и в контуре сервоуправления коэффициент усиления определяет, как — и в какой степени — контроллер пытается исправить ошибки, обнаруженные устройством обратной связи.
Усиления ПИД-регулятора используются при настройке сервопривода, чтобы определить, насколько система пытается исправить ошибки между заданным положением и фактическим положением.
Изображение предоставлено: Performance Motion Devices, Inc.
Величина пропорционального усиления в контуре управления определяет, какая восстанавливающая сила применяется для преодоления ошибки между заданным значением и фактическим значением. Пропорциональное усиление умножается на ошибку и генерирует вклад в выходной сигнал для следующего периода времени. Термин «пропорциональный» используется потому, что величина восстанавливающей силы прямо пропорциональна величине ошибки в любой момент времени.
Интегральное усиление используется для «подталкивания» системы к нулевой ошибке в конце перемещения. Интегральное значение коэффициента усиления увеличивается со временем — отсюда и термин «интегральный». Однако, поскольку интегральное усиление увеличивается в конце перемещения, это может привести к перерегулированию или колебаниям системы. И если интегральное усиление слишком низкое, система будет иметь большое время отклика. Интегральное усиление в основном используется, когда система подвергается статическим нагрузкам крутящего момента.
Прирост производной пропорционален скорости изменения (производной) ошибки. Он часто используется в сочетании с пропорциональным усилением, чтобы уменьшить перерегулирование и обеспечить демпфирование. Но слишком высокое усиление производной может сократить время отклика системы и вызвать колебания.
Коэффициенты прямой связи для высокодинамичных приложений
Описанные выше коэффициенты ПИД-регулятора представляют собой реактивные поправки к поведению системы с течением времени. Для высокодинамичных приложений или для лучшего отклика другой тип усиления, называемый усилением с прямой связью, работает вне контура обратной связи и обеспечивает упреждающий подход к исправлению ошибок путем прогнозирования команд, необходимых для достижения нулевой ошибки (вместо ожидания ошибка в разработке). Усиления с прямой связью классифицируются как с прямой связью по скорости или с прямой связью по ускорению.
Поскольку команды прямой связи работают вне контура обратной связи, они не вызывают колебаний или нестабильности.