Содержание
Роботизированная коробка передач, все плюсы и минусы правильного выбора
Роботизированная коробка передач — достойный выбор автовладельцев, сочетающий в себе надежность «механики» и удобство «автомата».
Прогресс не стоит на месте, а желание человека сделать свой быт более удобным, подталкивает его на все новые изобретения. Стараясь облегчить жизнь водителя по многочисленным пробкам, производители автомобилей постоянно совершенствуют свои детища, применяя всевозможные новшества. Вот и к механической коробке передач на автомобиле придумали автоматическое сцепление. Сложив совместно понятия автомат и механика, конструкторы получили устройство под названием роботизированная коробка передач, совместившее в себе плюсы и минусы обоих агрегатов.
Роботизированная коробка передач
Содержание
- Устройство роботизированной коробки
- Принцип работы
- Плюсы и минусы роботизированной коробки передач
- Преселективная коробка передач. Движение в верном направлении
- Достоинства и недостатки
- Подводя итоги
Устройство роботизированной коробки
Многие автовладельцы полагают, что роботизированная коробка представляет собой обычный автомат с какими-то особенностями. Но это не так. За основу конструкции разработчики взяли механическую коробку, более надежную, чем автоматическая, добавив к ней специальные устройства, отвечающие за выжим сцепления с переключением передач.
Но это не так. За основу конструкции разработчики взяли механическую коробку, более надежную, чем автоматическая, добавив к ней специальные устройства, отвечающие за выжим сцепления с переключением передач.
В обычной механике переключением передачи с выжимом сцепления заведует непосредственно водитель. Он самостоятельно, ориентируясь на дорожную ситуацию используя педаль сцепления с рычагом КПП, выбирает необходимую передачу согласно времени ее включения. Изобретатели решили исключить водителя из этой цепи, доверив все действия автоматике и компьютеру. Установив узлы-актуаторы, они сделали возможным автоматическое переключение роботизированной коробки, основой которой осталась механика.
Роботизированная механическая коробка передач, совместила положительные моменты постой механики и автомата — топливную экономичность, простоту ремонта и прочее с возможностью езды в автоматическом режиме без использования педали сцепления. При этом она сохранила возможность ручного управления при помощи рычага или подрулевых переключателей по принципу Типтроника.
Принцип работы
Коробка робот работает при помощи узлов-актуаторов. Получая информацию о скорости движения, оборотах двигателя, датчиков ABS и ESP с бортового компьютера и действуя через свою механическую часть, они выжимают сцепление, перемещают синхронизаторы в коробке, выбирая необходимую передачу. Сервопривод, ответственный за сцепление, приняв необходимую команду, рассоединяет первичный вал с двигателем. В это время второй сервопривод, выбрав нужную передачу, включает ее. После включения первый актуатор восстанавливает сцепление, и автомобиль продолжает движение.
Устройство роботизированной коробки передач
Сервоприводы, которые имеет робот, могут быть двух видов — электрические и гидравлические. Электрический представляет собой шаговый электродвигатель, перемещающий через редуктор свою исполнительную часть. Гидравлический привод воздействует через гидроцилиндр, получающий команды от электронного блока управления. Поэтому его еще называют электрогидравлическим.
Плюсы и минусы роботизированной коробки передач
- Коробка робот, выполненная на базе механики, обладает высокой надежностью по сравнению с автоматом и вариатором;
- Рабочий объем роботизированной коробки значительно меньше автоматической, и, значит, меньше количество используемого масла;
- Сцепление робота имеет увеличенный на 30 процентов ресурс;
- Почти все модификации имеют функцию переключения передач вручную по принципу Типтроника на автомате;
- Робот дешевле при производстве и ремонте по сравнению с вариаторной и автоматической коробками;
- Роботизированная коробка передач весит намного меньше, чем автоматическая, что дает ей преимущество для установки на малолитражные автомобили;
- Позволяет снизить расход топлива при равных условиях по сравнению с использованием всех остальных видов коробок передач.


Помимо достоинств робот имеет следующие недостатки:
- Коробка передач робот с электрическим сервоприводом обладает значительной задержкой переключения, достигающей 2-х секунд, которая вызывает дискомфорт при разгоне и динамичной езде;
- При использовании гидравлического привода применяется тормозная жидкость, которая постоянно находится под давлением, ускоряя процесс переключения до 0,05 секунды. Но гидравлический привод существенно дороже в устройстве, он повышает энергонагруженность мотора, являясь уделом дорогих автомобилей или спорткаров;
- На обычном роботе отсутствует возможность адаптации под стиль езды водителя. Если автомат может подстроиться, то робот поддерживает только один стиль, который установлен как прошивка в блоке управления.
Преселективная коробка передач. Движение в верном направлении
Из-за своих недостатков коробка переключения передач робот была встречена первыми покупателями довольно негативно. Основная претензия была в том, что робот работает с рывками во время движения. Но конструкторы, видя перспективу конструкции в ее простоте и дешевизне, не отказались от производства, продолжив поиски решения.
Но конструкторы, видя перспективу конструкции в ее простоте и дешевизне, не отказались от производства, продолжив поиски решения.
Для исправления ситуации, с целью избежать задержек переключения, производители предложили использовать коробку с двумя независимыми сцеплениями. Такое решение позволило полностью избавиться от рывков и задержек, увеличив динамику автомобиля, добавив комфорт водителю с пассажирами.
Audi с роботизированной коробкой передач
Первыми, кто начал серийно выпускать такие устройства, были Ауди и Фольксваген, начавшие устанавливать коробки DSG и S-Tronic на свои автомобили с 2003 года.
Двойное сцепление дало возможность включать последующую передачу при уже включенной передаче, переходя на нее без перерыва в работе коробки, сохранив тягу в полном объеме. Поэтому другое название коробки с двойным сцеплением — преселективная, что означает предварительно выбранная.
Если обычная коробка в устройстве имеет по одному первичному и вторичному валу, то такая получила в свою конструкцию их по два, предназначенных для четных и нечетных передач. При этом первичные валы вставлены один в другой по принципу матрешки, соединяясь с двигателем каждый отдельным многодисковым сцеплением.
При этом первичные валы вставлены один в другой по принципу матрешки, соединяясь с двигателем каждый отдельным многодисковым сцеплением.
При включении первой передачи на одном из вторичных валов в начале движения замыкается первое сцепление, автомобиль трогается. Умная электроника, понимая, что дальше должна быть вторая замыкает следующую шестерню на другом вторичном валу, но второе сцепление остается при этом разомкнутым, не внося конфликта в работу коробки. Как только необходимая скорость будет достигнута, произойдет одновременное выключение первого сцепления с включением второго. И так далее. При торможении процесс аналогичный, только в обратную сторону. Получается, что у такой коробки одновременно включены две передачи, что еще раз подтверждает ее название преселективная.
Скорость переключения преселективной коробки робота очень высока, превышающая по своим показателям скорости работы некоторых спортивных автомобилей. Например, робот серийного Гольфа имеет скорость переключения 8 миллисекунд, что меньше времени моргания глаза, а у Феррари Энзо роботизированная коробка переключается за 150 миллисекунд. Почувствуйте разницу, как говорят.
Почувствуйте разницу, как говорят.
Достоинства и недостатки
Совместив лучшее от всех разработок, коробки передач с двойным сцеплением стали экономичнее и быстрее обычных механических. При этом они более комфортны для пассажиров, чем другие. Обладая малыми габаритами, роботы предпочтительнее в использовании для малолитражных автомобилей по сравнению с автоматическими коробками.
Но несмотря на обилие плюсов, есть значительные минусы. Недостатками преселективной коробки является ее сложность ремонта при высокой стоимости производства. До недавнего времени также была проблема при передаче большого крутящего момента, но сейчас она уже решена.
Подводя итоги
отличие от АКПП, минусы, плюсы
Современный автомобиль уже не тот, что был пару десятков лет назад. Сегодня это высокотехнологичное транспортное средство с электронным управлением большинства процессов, различными полезными дополнениями (парктроник, ABS, «старт-стоп», и т. д.) и разнообразными вариантами конструкции трансмиссии, популярным из которых считается роботизированная коробка передач.
д.) и разнообразными вариантами конструкции трансмиссии, популярным из которых считается роботизированная коробка передач.
Называемая водителями по-простому «коробка робот», она по своей сути является механической КПП, в которой в автоматическом режиме осуществляется переключение передач. То есть на основании подаваемых водителем команд через селектор коробки и режима езды, система управления роботом согласно заложенному алгоритму выбирает наиболее подходящую передачу.
Роботизированная КПП это высокотехнологичный механизм, в котором сочетаются воедино топливная экономичность «механики» и высокая скорость работы коробки-автомат. Необходимо заметить, что такая трансмиссия стоит на порядок дешевле стандартной АКПП, поэтому сегодня гиганты автопрома комплектуют ей практически весь свой модельный ряд.
Особенности разных видов роботизированных коробок передач
Несмотря на то что эти коробки передач имеют различную конструкцию, принцип их управления и работы остается неизменным: стандартная «механика» дополненная автоматизированным модулем включения сцепления и управления переключением передач. В таком типе трансмиссии применяется фрикционный тип сцепления, состоящий как из одного диска, так и из нескольких. Однако в конструкции роботизированной КПП все более распространена система с двойным сцеплением, благодаря которой удается максимально передать крутящий момент, не теряя при этом мощности.
В таком типе трансмиссии применяется фрикционный тип сцепления, состоящий как из одного диска, так и из нескольких. Однако в конструкции роботизированной КПП все более распространена система с двойным сцеплением, благодаря которой удается максимально передать крутящий момент, не теряя при этом мощности.
Поскольку основу робота составляет классическая «механика», при проектировании этого вида трансмиссии используются уже готовые варианты коробок передач. Такое конструктивное решение позволяет получить высокие рабочие показатели всего узла. Например, у известного робота SMG, которым комплектует свои модели BMW, использована базовая шестиступенчатая МКПП дополненная сцеплением с электрогидравлическим приводом.
Роботизированная КПП на автомобиле может быть оборудована гидравлической либо электрической системами управления переключением позиций и включения сцепления. В системе с гидроприводом (электрогидравликой) органами исполнения команд роботизированной коробки выступают гидроцилиндры с электромагнитными клапанами, а в электрическом типе привода эти элементы представлены шестереночной передачей и электромотором.
Отметим, что для установленного на автомобилях электрического привода характерна низкая скорость при переключении передач а также минимальное потребление энергии. Гидропривод работает быстрее, однако для этого в системе постоянно должно поддерживаться давление, соответственно, энергопотребление при этом многократно возрастает.
По этой причине электроприводные роботизированные КПП устанавливают на автомобили бюджетного класса, а гидроприводные — на более дорогие транспортные средства. Такое конструктивное решение позволяет использовать трансмиссию-робот практически на любом типе транспортного средства.
Как устроены роботизированные КПП
Управление этим видом трансмиссии осуществляется при помощи электронного модуля, который обрабатывает сигналы с различных датчиков, и уже на основании этого отдает команды исполнительным механизмам и устройствам (электродвигатель, механическая передача, гидроцилиндр). Датчики собирают основную информацию о положении селектора КПП, оборотах коленвала, масляном давлении и его температуре, скорости движения автомобиля, которую передают для обработки управляющей системе. Далее происходит процесс переключения позиции, который строится согласно заранее заложенным алгоритмам исполнения команд на основании поступившей информации. Также система управления роботизированной коробкой переключения передач находится в постоянном взаимодействии с системами ESP и ABS, и на основании передаваемых ими данных корректирует процесс выбора и перемены передачи.
Далее происходит процесс переключения позиции, который строится согласно заранее заложенным алгоритмам исполнения команд на основании поступившей информации. Также система управления роботизированной коробкой переключения передач находится в постоянном взаимодействии с системами ESP и ABS, и на основании передаваемых ими данных корректирует процесс выбора и перемены передачи.
В конструкцию гидроприводных КПП дополнительно входит блок управления гидравликой, который обеспечивает поддержание постоянного давления в системе.
Конструкция роботизированной трансмиссии с системой двойного сцепления
Несмотря на всю функциональность и комфорт при управлении автомобилем, роботизированная коробка не лишена недостатков, главным из которых считается ее замедленная реакция при переключении передач, что крайне негативно отражается на динамике движения (возникают рывки и пропадет плавный ход в момент включения позиций). Значит, чтобы устранить эту проблему, и повысить комфортабельность управления транспортным средством оборудованным «роботом», конструкторы разработали трансмиссию с системой двойного сцепления, в которой процесс смены передач происходит без потери мощности.
Преимущества робота с двойным сцеплением
Помимо своего быстродействия, которое обусловлено повышенной скоростью взаимодействия муфт (например, коробка-робот DSG от Фольксваген), этот тип КПП имеет относительно компактные размеры, ввиду чего является идеальным для использования в малолитражных автомобилях. Кроме этого, роботизированная коробка с двойным сцеплением обладает повышенным энергопотреблением, что положительно отражается на ее продуктивности и скорости отклика на перемену положения селектора водителем. Это позволяет значительно снизить потребление топлива и получить высокие динамические показатели как при разгоне транспортного средства, так и при последующем движении.
Такая конструкция применяется в следующих видах роботизированных КПП:
- S-Tronic.
- DSG.
- Twin Clust SST.
- DCT M Drivelogic.
- PDK.
- TCT.
- Powershift.

Кстати, всемирноизвестный и популярный спорткар Ferrari 458 Italia оборудован роботизированной трансмиссией с системой двойного сцепления Doppelkupplungsgetriebe. На всех перечисленных видах КПП установлен гидропривод.
Блок управления адаптивным роботом DCT M Drivelogic содержит специальную систему Drivelogik, в которой содержится алгоритм переключения для одиннадцати передач. Шесть из них адаптированы для ручного выбора, а остальные пять переключаются полностью в автоматическом режиме.
Как работает роботизированная КПП
Все типы этой трансмиссии могут работать как в автоматическом, так и в ручном режимах управления. Если выбран режим «автомат», система управления КПП согласно информации передаваемой датчиками формирует соответствующие команды, которые далее передаются на устройства исполнения команд.
Коробка передач | Академия роботов
УРОК
 youtube.com/embed/M_GS3ahTq18?rel=0&showinfo=0″ frameborder=»0″ allowfullscreen=»»>
youtube.com/embed/M_GS3ahTq18?rel=0&showinfo=0″ frameborder=»0″ allowfullscreen=»»>
Стенограмма
Почти все электродвигатели используются в сочетании с редукторами. Причина этого в том, что электродвигатели развивают относительно низкий крутящий момент. Они не особо сильные. Однако они способны вращаться очень и очень быстро. Таким образом, мы можем использовать коробку передач, чтобы обменивать скорость на крутящий момент. Бесплатных обедов, конечно, не бывает, и коробка передач вносит некоторую неэффективность, есть некоторая потеря мощности. Эта потеря мощности связана с теплом и акустическим шумом.
Если вы пользуетесь велосипедом, вы, вероятно, хорошо знакомы с концепцией передачи. Электродвигатели способны вращаться очень-очень быстро, но они не производят большого крутящего момента, они довольно слабые.
Теперь это немного похоже на проблему езды на велосипеде в гору. Вы хотите пожертвовать большим количеством оборотов педалей, чтобы уменьшить нагрузку на эти педали.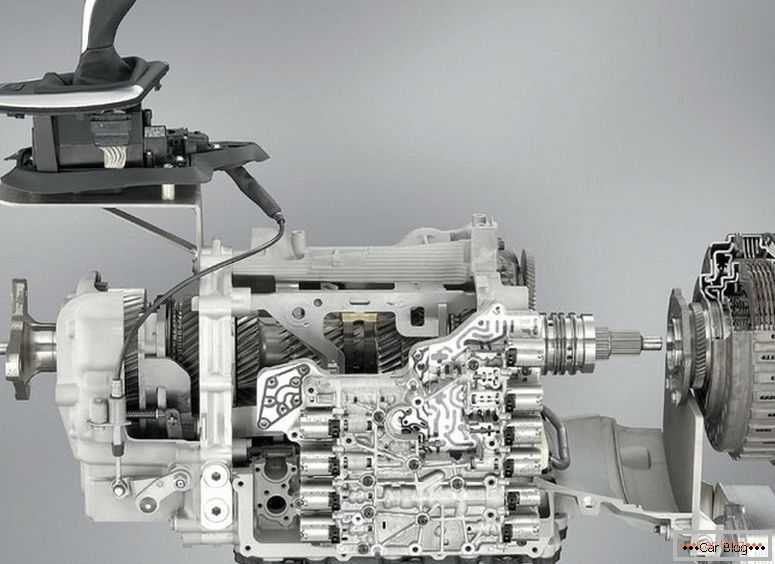 Вы обмениваете большую скорость на большой крутящий момент.
Вы обмениваете большую скорость на большой крутящий момент.
Для электродвигателя это то же самое, и, как и в случае с велосипедом, у вас есть маленькая звездочка спереди на педалях, а у вас есть звездочка побольше на заднем колесе. Таким образом, на каждый оборот электродвигателя приходится только половина оборота выходного вала редуктора двигателя. Таким образом, двигатель вращается довольно быстро, выходной вал вращается довольно медленно, но крутящий момент двигателя усиливается за счет передаточного числа.
Здесь у нас мотор с одноступенчатым редуктором. Мы называем его редуктором, потому что при каждом обороте двигателя выходной вал вращается менее одного раза. Когда мы обращаемся к двум сторонам редуктора, мы называем сторону двигателя, которая обозначается индексом M, и сторону нагрузки, которая обозначается индексом L. Передаточное число редуктора обозначается заглавной буквой G, и это соотношение количества зубьев на большое колесо к количеству зубьев на маленьком колесе. А для редуктора G больше единицы.
А для редуктора G больше единицы.
Выходная скорость omega L равна 1 на G, умноженному на omega N. Таким образом, скорость выходного вала ниже скорости двигателя. Выходной крутящий момент tau L равен произведению G на крутящий момент двигателя tau M, поэтому выходной крутящий момент больше, чем крутящий момент двигателя. Это основные уравнения, описывающие характеристики коробки передач. Это снижает скорость и увеличивает крутящий момент.
Электродвигатели
обычно довольно слабые, они развивают низкий крутящий момент, поэтому очень часто добавляют редуктор.
Профессор Питер Корк
Профессор роботизированного зрения в QUT и директор Австралийского центра роботизированного зрения (ACRV). Питер также является членом IEEE, старшим научным сотрудником Академии высшего образования и членом редколлегии нескольких журналов, посвященных исследованиям в области робототехники.
Уровень навыка
Математика средней школы
Этот контент предполагает понимание математики на уровне средней школы, т. е. тригонометрия, алгебра, исчисление, физика (оптика) и некоторые знания/опыт программирования (любой язык).
е. тригонометрия, алгебра, исчисление, физика (оптика) и некоторые знания/опыт программирования (любой язык).
Подробнее…
Оцените этот урок
В среднем
Вы должны войти, чтобы оставить отзыв.
За дизайном | Понимание конструкции двигателя и редуктора — блог Blue Alliance
Ян Уолтерс
Особая благодарность Autodesk
Зачем тратить время на выбор правильного двигателя и редуктора?
Выбор правильной комбинации двигателя и редуктора для конкретного применения очень важен как в ПЕРВОМ конкурсе робототехники (FRC), так и в
инженерные проекты. Без соответствующих комбинаций двигатель-редуктор ваша команда обнаружит, что ваш робот не работает так быстро и эффективно, как предполагалось, и может иметь тенденцию к перегоранию двигателей
.
В этом учебном пособии вы познакомитесь с основами проектирования и реализации редукторов. Во-первых, я научу вас характеристикам двигателя. Далее я расскажу, как выбрать двигатель
Во-первых, я научу вас характеристикам двигателя. Далее я расскажу, как выбрать двигатель
и передаточное число с учетом требований применения. Затем я предоставлю информацию о выборе редуктора, а затем обзор двигателей и редукторов
доступен в FRC. Наконец, я покажу, как использовать то, что вы узнали из этого руководства, на примере задачи и укажу на дополнительные инструменты и ресурсы, если вы хотите узнать больше.
Это руководство создано в рамках программы Autodesk FIRST High School Intern.
Предпосылки
– Базовое понимание физики – напр. силовые, крутящие, силовые и зубчатые системы
– Готовность учиться
Характеристики двигателя
Есть несколько важных характеристик двигателей, которые предоставляют информацию о двигателе и его возможностях. Это выходной крутящий момент двигателя, потребляемый им ток, его выходная скорость, его мощность и его эффективность, каждый из которых я буду обсуждать по очереди. Эти характеристики взаимозависимы и могут быть получены из четырех значений: крутящий момент двигателя, ток останова, свободный ток и скорость холостого хода.
Эти характеристики взаимозависимы и могут быть получены из четырех значений: крутящий момент двигателя, ток останова, свободный ток и скорость холостого хода.
Крутящий момент
Выходной крутящий момент двигателя — это сила, с которой его выходной вал может вращаться. Если к двигателю приложен слишком большой крутящий момент, его выходной вал заглохнет или перестанет вращаться. Другие характеристики двигателя обычно записываются как функция крутящего момента. Обычно он измеряется в Нм, когда требуются метрические единицы, и в унциях-дюймах, когда требуются английские единицы.
Потребляемый ток
Потребляемый двигателем ток — это величина электрического тока, потребляемого двигателем при любой заданной нагрузке. По мере увеличения нагрузки на двигатель (крутящий момент) величина тока, потребляемого двигателем, увеличивается линейно. Это отношение можно записать как
| (1) |
| Символ | Имя | Единицы | Описание |
| я | Текущий | Ампер (А) | Величина тока, потребляемого двигателем |
| Исталь | Ток остановки | Ампер (А) | Величина тока, потребляемого при остановленном двигателе |
| Ифри | Свободное течение | Ампер (А) | Величина тока, потребляемого двигателем без нагрузки |
| τ стойло | Тормозной момент | Ньютон-метры (Н-м) | Величина крутящего момента, необходимая для остановки двигателя |
| т | Крутящий момент | Ньютон-метры (Н-м) | Величина крутящего момента, приложенного к выходному валу двигателя |
Скорость
Выходная скорость двигателя — это скорость вращения, с которой вращается выходной вал. По мере увеличения нагрузки на двигатель выходная скорость уменьшается линейно. Это отношение можно записать как
По мере увеличения нагрузки на двигатель выходная скорость уменьшается линейно. Это отношение можно записать как
| (2) |
| Символ | Имя | Единицы | Описание |
| ω | Скорость | выстрелов в минуту (об/мин) | Скорость вращения выходного вала двигателя |
| ω бесплатно | Свободная скорость | выстрелов в минуту (об/мин) | Скорость вращения двигателя без нагрузки |
| τ стойло | Тормозной момент | Ньютон-метры (Н-м) | Величина крутящего момента, необходимая для остановки двигателя или предотвращения вращения его выходного вала |
| т | Крутящий момент | Ньютон-метры (Н-м) | Величина крутящего момента, приложенного к выходному валу двигателя |
Фото: http://www.![]() engin.umich.edu/group/ctm/examples/motor/motor.html
engin.umich.edu/group/ctm/examples/motor/motor.html
Мощность
Мощность двигателя — это скорость, с которой двигатель может выполнять работу. По сути, это измерение того, насколько быстро двигатель может выполнять работу. Его значение в ваттах определяется уравнением
| (3) |
| Символ | Имя | Единицы | Описание |
| Р | Мощность | Вт | Количество энергии, отдаваемой двигателем |
| т | Крутящий момент | Ньютон-метры (Н-м) | Величина крутящего момента, приложенного к выходному валу двигателя |
| ω | Скорость | выстрелов в минуту (об/мин) | Скорость вращения выходного вала двигателя |
КПД
КПД двигателя — это показатель того, сколько электрической энергии, подаваемой в двигатель, преобразуется в механическую энергию. Большая часть оставшейся энергии преобразуется в тепло, что может привести к перегоранию двигателя, если он работает с крутящим моментом/об/мин, при которых его КПД очень низок. Эффективность определяется уравнением
Большая часть оставшейся энергии преобразуется в тепло, что может привести к перегоранию двигателя, если он работает с крутящим моментом/об/мин, при которых его КПД очень низок. Эффективность определяется уравнением
| (4) |
| Символ | Имя | Единицы | Описание |
| η | Эффективность | Процент (%) | Процент подводимой к двигателю электрической энергии, которая преобразуется в полезную механическую энергию |
| Путь | Выходная мощность | Вт | Выходная мощность двигателя при заданном крутящем моменте и скорости |
| Контакт | Потребляемая мощность | Вт | Количество электроэнергии, подаваемой на двигатель |
| я | Текущий | Ампер (А) | Величина тока, потребляемого двигателем |
| В | Напряжение | Вольт (В) | Напряжение, при котором работает двигатель |
Фото: http://www. engin.umich.edu/group/ctm/examples/motor/motor.html
engin.umich.edu/group/ctm/examples/motor/motor.html
Кривые двигателя
Скорость двигателя, потребляемый ток, мощность и КПД часто отображаются в зависимости от выходного крутящего момента, чтобы их значения было легче визуализировать. Все уравнения для этих кривых получены из четырех описанных выше спецификаций с использованием уравнений с 1 по 4 на предыдущих нескольких страницах.
График на этой странице показывает характеристики двигателя CIM, который очень часто используется в FRC.
Выбор двигателя и передаточного числа
Теперь, когда вы понимаете характеристики двигателей, вы можете выбрать двигатель и передаточное число для вашего приложения. Какой двигатель наиболее подходит для данной работы, полностью зависит от требований приложения. Это означает, что вы должны определить конечные результаты, например, насколько большой груз вы перемещаете и как быстро вы хотите, чтобы он перемещался, а затем преобразовать их в требования, такие как выходной крутящий момент и скорость.
Начните с изучения технических характеристик доступных двигателей. Спецификация двигателя для сезона FRC 2012 г. включена на эту страницу. При выборе двигателя и передаточного числа необходимо учитывать множество факторов, в том числе:
- Как редуктор повлияет на выходной крутящий момент и скорость двигателя. Обычно шестерни используются для уменьшения скорости и увеличения крутящего момента.
- Неэффективность передачи мощности – эффективность каждой ступени зубчатой передачи или цепи составляет примерно 90 %.
- Различия между теоретической и фактической производительностью. Поскольку теоретические характеристики обычно лучше, чем фактические, даже с учетом неэффективности, важно выбирать двигатели и передаточные числа с приемлемым коэффициентом безопасности. То есть убедитесь, что они смогут обрабатывать больше ожидаемой нагрузки на более высокой, чем требуется, скорости.
- Количество тока, которое может потреблять один двигатель, ограничено автоматическими выключателями на распределительном щите. При использовании выключателя на 40 ампер потребление тока ограничено максимальным значением 40 ампер, а это означает, что вы должны спроектировать двигатели так, чтобы они потребляли менее 40 ампер при ожидаемой нагрузке. Кроме того, робот может одновременно потреблять не более 120 ампер, что ограничивается главным автоматическим выключателем.
- Работающие двигатели с нагрузкой останова или близкой к ней, максимальный крутящий момент, который они могут выдавать, приведет к их возгоранию, поскольку большая часть энергии, подаваемой на двигатель, будет преобразована в тепло. Количество тепла, которое может выдержать двигатель, напрямую связано с его общей массой. По этой причине у тяжелых двигателей, таких как CIM, гораздо меньше шансов сгореть, чем у более мелких, таких как двигатели Fisher Price.
- Если ни один двигатель не соответствует вашим требованиям, рассмотрите возможность объединения двигателей. При объединении двух двигателей выходной крутящий момент и потребляемый ток складываются, а выходная скорость не изменяется. Если два разных двигателя согласовываются друг с другом, их свободные скорости должны быть согласованы с помощью редуктора. Например, сочетание двигателя Fisher Price и CIM потребует дополнительного передаточного числа 3:1 для двигателя Fisher Price, поскольку его выходная скорость примерно в 3 раза выше, чем у CIM. Если выходные скорости не совпадают, это вызовет дополнительное сопротивление в редукторе и сведет на нет все преимущества наличия нескольких двигателей.
 При использовании выключателя на 40 ампер потребление тока ограничено максимальным значением 40 ампер, а это означает, что вы должны спроектировать двигатели так, чтобы они потребляли менее 40 ампер при ожидаемой нагрузке. Кроме того, робот может одновременно потреблять не более 120 ампер, что ограничивается главным автоматическим выключателем.
При использовании выключателя на 40 ампер потребление тока ограничено максимальным значением 40 ампер, а это означает, что вы должны спроектировать двигатели так, чтобы они потребляли менее 40 ампер при ожидаемой нагрузке. Кроме того, робот может одновременно потреблять не более 120 ампер, что ограничивается главным автоматическим выключателем. Если два разных двигателя согласовываются друг с другом, их свободные скорости должны быть согласованы с помощью редуктора. Например, сочетание двигателя Fisher Price и CIM потребует дополнительного передаточного числа 3:1 для двигателя Fisher Price, поскольку его выходная скорость примерно в 3 раза выше, чем у CIM. Если выходные скорости не совпадают, это вызовет дополнительное сопротивление в редукторе и сведет на нет все преимущества наличия нескольких двигателей.
Если два разных двигателя согласовываются друг с другом, их свободные скорости должны быть согласованы с помощью редуктора. Например, сочетание двигателя Fisher Price и CIM потребует дополнительного передаточного числа 3:1 для двигателя Fisher Price, поскольку его выходная скорость примерно в 3 раза выше, чем у CIM. Если выходные скорости не совпадают, это вызовет дополнительное сопротивление в редукторе и сведет на нет все преимущества наличия нескольких двигателей.Принимая во внимание все эти факторы в своих расчетах при выборе двигателя и передаточного числа, вы гарантируете, что ваш робот будет работать так, как вы задумали, с первого раза. Пример задачи в конце этого урока продемонстрирует, как пройти процесс выполнения этих вычислений.
Доступные двигатели
В этом разделе руководства описываются некоторые общие сценарии использования различных двигателей, допущенных к участию в FIRST Robotics Competition.
| Название двигателя | Изображение | Примечания |
| Серия RS-500: AndyMark 9015 Fisher Price BaneBots RS-550 | Все эти три двигателя очень похожи — единственными отличительными факторами являются их технические характеристики. Как правило, они используются в манипуляторах, таких как приводное колесо качки, лифт или система конвейера/коллектора. Как правило, они используются в манипуляторах, таких как приводное колесо качки, лифт или система конвейера/коллектора. | |
| БейнБотс RS-775 | RS-775 — более крупная и мощная версия двигателей серии RS-500. Он также широко используется для манипуляторов. Тем не менее, двигатели RS-775 имеют историю развития коротких замыканий корпуса, из-за чего некоторые команды избегают их использования. | |
| МГК | CIM — самый большой, самый мощный и самый надежный двигатель, поставляемый командам FRC. Поскольку командам разрешено использовать только 4 из них, они должны быть закреплены за трансмиссией, где их мощность и надежность наиболее необходимы. | |
| Денсо (окно мотор) | Оконный мотор — это мотор, к которому прикреплен червячный редуктор. Его высокий крутящий момент и низкая скорость часто используются в манипуляторах. Из-за червячного привода их нельзя вернуть назад, что желательно для некоторых приложений. | |
| Векс 393 | Vex 393 — новый мотор сезона 2012 года. По этой причине он не нашел большого применения. Однако его небольшой размер и относительно высокий крутящий момент делают его подходящим для второстепенных функций в манипуляторах. По мере того, как команды будут лучше знакомиться с ним, этот двигатель, вероятно, найдет более широкое применение в большем количестве приложений. |
Фото:
http://www.andymark.com/product-p/am-0316.htm
http://www.andymark.com/product-p/am-0912.htm
http: //www.o-digital.com/uploads/2179/2188-1/DC_Motor_RS_775_7712_197.jpg
http://www.andymark.com/CIM-motor-FIRST-p/am-0255.htm
http:// www.usfirst.org/sites/default/files/uploadedFiles/Robotics_Programs/FRC/Game_and
_Season__Info/2012_Assets/KickoffKitChecklistRev_A.pdf
http://www.vexrobotics.com/products/accessories/motion/276-2177.html
Выбор коробки передач
Теперь, когда вы выбрали двигатель и передаточное число, вам нужно выбрать коробку передач. Первым требованием при выборе редуктора является то, что выбранный двигатель должен подходить к редуктору. Хотя большинство двигателей имеют уникальную схему расположения болтов, двигатель BaneBots RS-550, двигатель Fisher Price и двигатель AndyMark 9015 относятся к серии двигателей RS-500 и, следовательно, имеют одинаковую схему крепления.
Первым требованием при выборе редуктора является то, что выбранный двигатель должен подходить к редуктору. Хотя большинство двигателей имеют уникальную схему расположения болтов, двигатель BaneBots RS-550, двигатель Fisher Price и двигатель AndyMark 9015 относятся к серии двигателей RS-500 и, следовательно, имеют одинаковую схему крепления.
Далее, коробка передач должна иметь выбранное вами передаточное число. Однако в этом требовании больше свободы действий. Некоторые редукторы могут быть «собраны» вместе, создавая большие сокращения. Кроме того, не все уменьшение должно происходить в коробке передач, вместо этого его можно обеспечить с помощью систем передачи мощности, таких как звездочки и цепь. Также возможно, что точная передача, которую вы хотите, недоступна, и в этом случае достаточно близко.
Наконец, коробка передач должна иметь выходной вал, который можно использовать. Хотя наиболее распространены шпоночные валы различных размеров, шестигранные валы становятся все более популярными в FRC. Существует также множество различных ступиц для различных типов выходных валов. В конечном счете, это наименее ограничительное требование при выборе коробки передач.
Существует также множество различных ступиц для различных типов выходных валов. В конечном счете, это наименее ограничительное требование при выборе коробки передач.
Доступные редукторы
В следующем разделе приведен список часто используемых редукторов, совместимых с обычными двигателями.
| Название двигателя | Совместимые коробки передач |
| Серия RS-500: AndyMark 9015 Fisher Price BaneBots RS-550 | Banebots RS-500 Planetary AndyMark CIM-Sim AndyMark 3 Stage Toughbox AndyMark Planetary AndyMark Double Doozy Planetary |
| БейнБотс RS-775 | Планетарная передача BaneBots RS-700 Планетарная передача AndyMark PG71 |
| МГК | Жесткий ящик ЭндиМарка AndyMark Toughbox Mini AndyMark Toughbox Nano AndyMark 3 Stage Toughbox AndyMark CIMple Box AndyMark Shifter AndyMark Super Shifter |
Фотография предоставлена: http://www. andymark.com/product-p/am-0114.htm
andymark.com/product-p/am-0114.htm
Использование того, что мы узнали
Процесс проектирования коробки передач. На приведенном выше рисунке показано изображение двухступенчатого лифта, элемента манипулятора, обычно используемого в FRC. Задача состоит в том, чтобы спроектировать редуктор, способный приводить в движение лебедку диаметром 3 дюйма и поднимать лифт на максимальную высоту 84 дюйма за 1,5 секунды. Для решения задачи сделаем два основных упрощения: во-первых, предположим, что 18-фунтовая нагрузка действует на весь ход лифта, тогда как в действительности лебедка должна поднимать вес первой ступени только на половину пути. расстояния. Во-вторых, мы будем игнорировать время разгона и торможения, так как эти расчеты выходят за рамки данного руководства.
Сначала мы преобразуем все единицы измерения в метрические, потому что с метрическими единицами намного проще работать.
Далее мы должны превратить наши конечные цели в требования, которые можно использовать для выбора двигателя и передаточного числа.
Расчет требуемой скорости вращения лебедки:
Количество оборотов для подъема лифта:
Расчет нагрузки на лебедку:
Теперь мы должны выбрать двигатель и передаточное число. Мы начнем с рассмотрения технических характеристик доступных двигателей и предположим, какой двигатель может подойти для этой работы. Мы попробуем использовать один BaneBots RS-550 в качестве отправной точки из-за его высокой мощности, что означает, что он сможет выполнять работу быстрее. Кроме того, он обычно используется в подобных приложениях, а это означает, что он, вероятно, хорошо подходит для работы в целом. Чтобы упростить оценку, я сделал график кривой двигателя для RS-550.
Во-первых, мы хотим убедиться, что двигатель не потребляет более 40 А и не перегорает автоматический выключатель. Глядя на график, мы можем визуально увидеть, что RS-550 потребляет 40 А при нагрузке 0,23 Нм. потребляемый ток 20 А. Снова взглянув на график, мы видим, что это соответствует крутящему моменту 0,115 Нм. Теперь мы можем рассчитать уменьшение, которое нам потребуется для достижения необходимого крутящего момента в 3,05 Нм.
Теперь мы можем рассчитать уменьшение, которое нам потребуется для достижения необходимого крутящего момента в 3,05 Нм.
Передаточное число:
Теперь мы выбрали передаточное отношение 26:1, что означает, что мы можем рассчитать точную нагрузку, с которой должен столкнуться наш двигатель лифта.
Нагрузка на двигателе:
Теперь мы можем использовать уравнение (1) из «Характеристики двигателя» для расчета тока, который, как мы ожидаем, потребляет RS-550 при этой нагрузке: находится в допустимых пределах 40 А. Затем мы определим скорость вращения выходного вала редуктора, используя уравнение (2). На этом этапе расчетов мы учтем КПД редуктора 75%.
Скорость двигателя:
Теперь мы можем проверить, позволит ли выбранное нами передаточное число достичь желаемой выходной скорости, 357 об/мин.
Скорость редуктора:
Наконец, теперь, когда мы убедились, что наше передаточное число удовлетворяет нашим требованиям, мы можем рассчитать, сколько времени потребуется двигателю, чтобы поднять лифт.
Время подъема:
Теперь мы полностью убедились, что наш двигатель RS-550 и коробка передач 26:1 достигнут наших первоначальных целей или даже превзойдут их. Поскольку реальная производительность часто хуже теоретической производительности, целесообразно «перепроектировать» эти системы. Это также гарантирует, что наши упрощения не приведут к тому, что наша система будет работать намного хуже, чем ожидалось.
Когда вы впервые выполняете этот процесс, вам, возможно, придется выполнять расчеты несколько раз, пробуя разные двигатели и передаточные числа. По мере приобретения опыта вы интуитивно будете понимать, какие двигатели и передаточные числа лучше всего подходят для работы.
Последним шагом в этом процессе является выбор коробки передач. В этом примере выбор версии RS-550 коробки передач Banebot P60 с передаточным числом 26:1 имеет большой смысл. Он не только совместим с нашим двигателем, но также имеет правильный редуктор и обычный выходной вал со шпонкой 0,5 дюйма.
Надеемся, что этот пример задачи помог вам понять процесс выбора двигателя и редуктора. Кроме того, я надеюсь, что он показал вам, как правильно применять теорию, которую вы изучили ранее в этом руководстве.
Ссылки
Этот раздел руководства предназначен для предоставления некоторых дополнительных ресурсов для изучения двигателей и редукторов, а также некоторых инструментов, которые могут ускорить процесс проектирования. Однако НЕ используйте инструменты вместо понимания теории. Вместо этого используйте их, потому что вы проверили их на своих собственных расчетах и потому что вы понимаете, как они работают.
Калькулятор конструкции Джона В-Нейна. Эта таблица может значительно ускорить процесс выбора двигателя и передаточного числа. Однако используйте его только после того, как вы поймете теорию, лежащую в основе расчетов.
ПЕРВАЯ ВСТРЕЧА С ФИЗИКОЙ: В этом уроке изучаются некоторые фундаментальные понятия физики, встречающиеся в FRC.