Содержание
Почему на «роботе» нельзя ездить так же, как на обычной АКПП? | Обслуживание | Авто
Владимир Гаврилов
Примерное время чтения: 5 минут
26280
Категория:
Техника вождения
Роботизированные коробки делятся на два вида: с одним и с двумя сцеплениями. «Роботы» первого типа изготавливаются из механических ручных 5-ступенчатых коробок путем присоединения к ним мехатроника и исполнительных механизмов, умеющих дергать кулису вместо человека.
К коробке крепится электромеханический блок с тягами, который по команде управляющей электроники разжимает сцепление и втыкает передачи. По сути, это настоящий робот с руками, но без ног, севший внутри моторного отсека на трансмиссию и выполняющий за водителя тяжелую работу. Благодаря этому появляется возможность убрать из салона надоедливую педаль сцепления.
Однако нужно помнить, что функционирует такая роботизированная коробка совсем не как «автомат». При переключениях она надолго задумывается и меняет ступени с рывками, и автомобиль едет в рваном ритме. Все это быстро надоедает.
Слабое звено роботизированной трансмиссии — это сцепление. При попытках ездить с «роботом», как на автомате в режиме D, оно быстро изнашивается.
Дело в том, что в классическом «автомате» передача крутящего момента от двигателя к коробке происходит через особый технический узел, называемый гидротрансформатором. Он не имеет прямой механической связи между входным и выходным валами, а момент перебрасывается за счет вращения крыльчатых колес в масле. Тереться там нечему.
Однако «робот» устроен по-другому. Он не имеет гидротрансформатора, и если подолгу выжимать сцепление на остановках, то внутренняя механика коробки изнашивается. Трутся и греются диски, испытывает сверхнормативные нагрузки вилка, подшипник и прочие детали.
В общем, на «роботе» нельзя стоять на светофоре в режиме D и надо как можно чаще переключать коробку в нейтраль (N). Тогда сцепление проживет намного дольше.
Тогда сцепление проживет намного дольше.
Два диска лучше, чем один
Второй тип роботизированных трансмиссий — это очень дорогие и сложные в производстве преселективные коробки. Они были изобретены для автоспорта и пришли в мир гражданского автомобилестроения благодаря Porsche и Volkswagen.
Конструктивно они не похожи на вышеописанные роботизированные коробки и по техническим характеристикам намного превосходят классические гидромеханические «автоматы» . Но преселективные «роботы» имеют и ряд недостатков, главный из которых — это низкая надежность пакета сцеплений.
Преселективная коробка имеет сразу два сцепления вместо одного. За счет этого удается избежать рывков и снизить время переключения ступеней. Разгон получается ровным и динамичным.
Преселективная коробка получила защиту от перегрева при движении в пробке. Во время остановок она умеет разводить диски на максимальное расстояние без вреда для себя. Поэтому переводить ее в нейтраль не нужно. Однако здесь тоже есть хитрости.
На остановках от водителя требуется нажимать тормоз с заметным усилием. Тогда электроника понимает его намерение, размыкает сцепление, мотор сбрасывает обороты до холостых, стрелка тахометра опускается до 800 единиц и машина стоит перед светофором и ждет следующей команды на старт. Нет трения — нет перегрева и выработки технического узла.
Однако если водитель жмет на педаль вполсилы и лишь гладит ее ногой, то электроника путается. Она считает, что автомобиль начал плавное движение, а значит, сцепление должно действовать в режиме легкого зацепления. Диски сходятся, трутся и передают небольшой момент от мотора. Автомобиль как бы имитирует работу гидротрансформатора и старается по чуть-чуть ползти вперед. Но тормоз полностью не разжат, и машина остается на месте. А расслабившийся водитель даже не предполагает, что убивает свой автомобиль.
Пробка — главная опасность
Противопоказано «роботам» обоих типов и движение в пробке со скоростью 2-3 км/ч, хотя классический гидромеханический «автомат» с черепашьим шагом справляется играючи. В любом заторе можно видеть такие микроскопические подвижки на 20-30 см.
В любом заторе можно видеть такие микроскопические подвижки на 20-30 см.
Минимальная безопасная скорость для любого «робота» — 5 км/ч, то есть нижний порог скорости движения на первой передаче с полностью сомкнутым сцеплением.
Поэтому в пробках, чтобы продлить ресурс «робота», необходимо действовать по строгому алгоритму: старт и остановка с крепким выжимом педали тормоза. Если поток едет со скоростью менее 5 км/ч, можно подождать, пока впереди освободится пространство, и потом проехаться вперед со скоростью 5 км/ч. Естественно, это раздражает окружающих, но капризный «робот» требует щепетильного отношения к себе. Иначе блок сцепления придется менять уже к 60 тыс. км пробега.
коробка передачтехника вождениясоветы автомобилистам
Следующий материал
Самое интересное в соцсетях
Новости СМИ2
что это такое, плюсы и минусы
Автоматизация переключения передач — благо несомненное.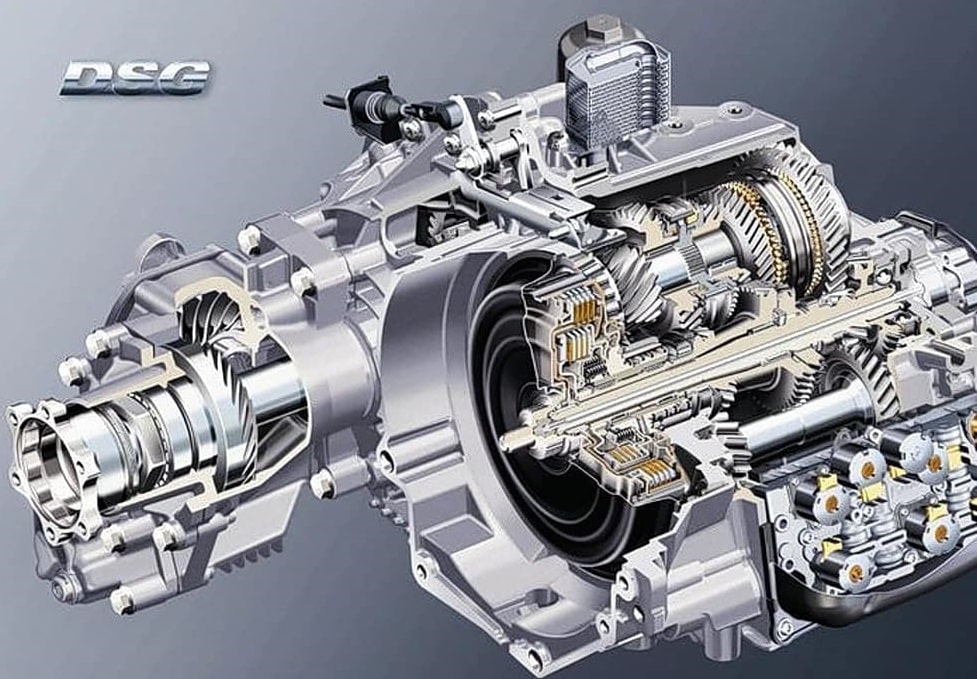 Но применение АКПП всегда сопровождается ростом объёма оборудования, сложностью, а значит и высокой удельной стоимостью в общей цене автомобилей. Не для всех категорий машин это приемлемо. Особенно при неизбежном снижении экономичности, ведь КПД механической коробки остаётся максимальным для всех типов трансмиссий. Так и появилась роботизированная коробка передач, что это такое — станет понятно при изучении её принципиального устройства.
Но применение АКПП всегда сопровождается ростом объёма оборудования, сложностью, а значит и высокой удельной стоимостью в общей цене автомобилей. Не для всех категорий машин это приемлемо. Особенно при неизбежном снижении экономичности, ведь КПД механической коробки остаётся максимальным для всех типов трансмиссий. Так и появилась роботизированная коробка передач, что это такое — станет понятно при изучении её принципиального устройства.
Содержание
Место роботов в ряду автоматических коробок передач
Решение проблемы выглядит естественным — достаточно взять обычную механику и снабдить её электроприводами переключения передач и управления сцеплением. Так будут совмещены сразу две особенности разных типов коробок, на переключение водитель уже не будет отвлекаться, педаль сцепления тоже можно упразднить, а отсутствие проскальзываний и потерь повысит экономичность до уровня обычной МКПП.
Долгое время задача не имела простого решения:
- не существовало надёжных, компактных и быстродействующих электронных блоков управления, позволявших реализовать сложный алгоритм переключения во всех возможных ситуациях;
- техника сервоприводов также отставала, переключение занимало слишком много времени, а развиваемого усилия всегда не хватало;
- для обеспечения плавного переключения передач было необходимо точно управлять двигателем, что стало возможным лишь с появлением электронных систем впрыска и зажигания.


Тем не менее, сама идея выглядела заманчиво, что и привело в конечном счёте к появлению первых серийных образцов.
Два типа роботизированных коробок
Кроме автоматизации переключения, разработка узлов и алгоритмов мехатроники, то есть объединения преимуществ точной механики с возможностями и скоростью электронных технологий, позволила создавать трансмиссии с совершенно новыми свойствами. Но изначально это были просто МКПП с сервоприводами. Принцип работы роботизированной коробки передач заключается в прямом электронном управлении механикой, без дополнительных гидравлических устройств.
Роботы с одним сцеплением
С точки зрения потребителя, который не желает разбираться в технике и выяснять устройство роботизированной коробки передач, это обычный «автомат». Педаль сцепления отсутствует, имеется классический селектор выбора режимов. Как и у всех современных коробок, он не связан с механизмами, а лишь задаёт режим электронному блоку управления.
Самые первые роботы всё же требовали вмешательства водителя. Ему не надо было вручную выбирать передачу, но обозначать момент приходилось, подсбрасывая газ. Сейчас электроника всё делает сама. Она выберет момент переключения, снизит крутящий момент двигателя, выжмет сцепление, переведёт вилки и муфты КПП в нужное положение и вновь добавит газ, одновременно плавно сомкнув диски сцепления.
В состав типичного робота входят:
- обычная коробка передач, вполне унифицированная по большинству деталей с ручным аналогом;
- стандартное для данной модели автомобиля сухое однодисковое сцепление с тем же демпфером;
- соленоиды выбора передачи, в простейшем случае их два, один имитирует движение ручки вправо и влево, второй — вперёд и назад;
- соленоид выжима сцепления, связанный с обычными вилкой и выжимным подшипником;
- электронный блок управления, где расположено самое главное – программа с алгоритмом работы коробки, который должен предусмотреть всё многообразие возможных ситуаций, начиная от трогания с места и «ползущего» режима, заканчивая спортивными быстрыми переключениями вверх и вниз, сбросом нескольких передач при кикдауне, экономным движением и ограничением передач для зимы, бездорожья и ручного управления;
- селектор с блокировкой и датчиками.

У людей, впервые столкнувшихся с установленным на машине роботом, может возникнуть вопрос, как правильно ездить на роботизированной коробке передач. В общем случае об этом можно не задумываться. Не сложнее, чем на любом другом автомате. Разве что иногда стоит подсказать коробке желательный момент переключения, уменьшив подачу топлива. Но постепенно блок и сам адаптируется под стиль езды, начав неплохо угадывать желания человека после запоминания полученной информации о его стиле езды. И вспомнить о наличии ручного тормоза, режим паркинга тут не предусмотрен, а оставлять машину на передаче не все роботы позволяют, да это и нежелательно с точки зрения техники.
Преселективные коробки с двумя сцеплениями
Получив в своё распоряжение успешно работающий мехатроник, инженеры использовали его для создания более совершенной автоматизированной коробки с предварительным выбором передачи. При разгоне на перевод муфты синхронизатора на следующую ступень затрачивается немало по меркам спорта времени. Было решено применить два вала, отдельно для чётных и нечётных передач, каждый со своим сцеплением.
Было решено применить два вала, отдельно для чётных и нечётных передач, каждый со своим сцеплением.
В такой коробке, широко известной как DSG, что буквально означает наличие двух сцеплений, оба из них нормально выключены, а сигнал на включение поступает только на то, которое требуется в данный момент. Например, происходит разгон на третьей передаче, замкнуто нечётное сцепление. Коробка по сигналам своих датчиков догадывается, что предстоит быстрый переход на четвёртую передачу. Она и будет включена заблаговременно на чётном валу. В оптимальный по соображениям минимального времени разгона момент останется лишь разомкнуть сцепление нечётного вала, одновременно сомкнув на чётном. Процесс произойдёт максимально быстро, не потребуется даже снижать обороты двигателя, достаточно лишь чуть уменьшить крутящий момент, чтобы избежать повышенного износа. И чем интенсивней разгон, тем меньше внимания уделяется сохранности дисков сцеплений, зато выше скорость перехода на следующую ступень.
Такие коробки тоже являются роботизированными, хотя у них совершенно иной путь развития, причины появления и характерные особенности. Тем не менее, это также механическая коробка с электронным переключением. Но в среде автомобилистов всё же принято считать, что робот — это то, что с одним стандартным сцеплением, а DSG уже совершенно другое дело.
Тем не менее, это также механическая коробка с электронным переключением. Но в среде автомобилистов всё же принято считать, что робот — это то, что с одним стандартным сцеплением, а DSG уже совершенно другое дело.
Читайте также: Что такое Вебасто в машине
Достоинства и недостатки автоматизированных МКПП
С точки зрения человека за рулём и самой философии построения современных автоматических коробок, все они одинаковы. Везде наличествуют только две педали, селектор и типовые режимы работы. Даже структурно они схожи. Механический выбор передаточного числа и фрикционные муфты для смягчения скачков момента при переключениях. Не очень важно в теории, как именно это реализовано на практике, и чем робот отличается от автомата. Цилиндрические косозубые шестерни, муфты и синхронизаторы в роботах, планетарные передачи в классическом гидроавтомате, ремень на конических шкивах в вариаторе. Гидротрансформатор в АКПП и вариаторах, демпфер в роботе. Пакеты фрикционов или сухие диски. Даже в преселективах ещё окончательно не решено, использовать сухие однодисковые или мокрые сцепления пакетного типа. А вариаторы стали появляться гибридного типа, где в одном корпусе объединены коническая ременная передача с планетарным двухступенчатым редуктором от классики.
Пакеты фрикционов или сухие диски. Даже в преселективах ещё окончательно не решено, использовать сухие однодисковые или мокрые сцепления пакетного типа. А вариаторы стали появляться гибридного типа, где в одном корпусе объединены коническая ременная передача с планетарным двухступенчатым редуктором от классики.
Тем не менее, выделить некоторые особенности пока можно, ещё не все коробки эволюционировали к единому типу. И здесь у робота найдутся некоторые плюсы:
- простота и дешевизна реализации;
- унификация с ручными КПП;
- высокий КПД и экономичность;
- недорогое стандартное сцепление, которое легко меняется;
- отсутствие необходимости в специальных маслах;
- нет проблем с точным, сложным и капризным гидроблоком на основе многочисленных соленоидов;
- не требуется масляный насос с регулятором давления;
- при ремонте не нужен особо квалифицированный персонал, достаточно любого мастера, имевшего дело с механическими коробками.

Из недостатков можно отметить только относительно медленную работу и некоторую невнятность в сложных ситуациях. Но первое потребуется разве что спортсменам, а второе поддаётся коррекции при совершенствовании алгоритмов управления. Было бы желание у производителей и потребителей всем этим заниматься. Роботизированная коробка передач плюсы и минусы выявляет только до отработки всех тонкостей в конструировании трансмиссий, став совершенной, она просто может занять своё место в ряду конкретных технических решений.
Применение в современных автомобилях и перспективы
К сожалению, первые несовершенные роботы создали у потребителей сильное предубеждение к подобным коробкам. Их считают медленными и непредсказуемыми, особенно на фоне прошедших долгий путь развития классических автоматов. Народное мнение настолько инертно, что изменить его уже вряд ли получится. В результате многие компании отказались от применения автоматизированных МКПП, а другие близки к такому решению.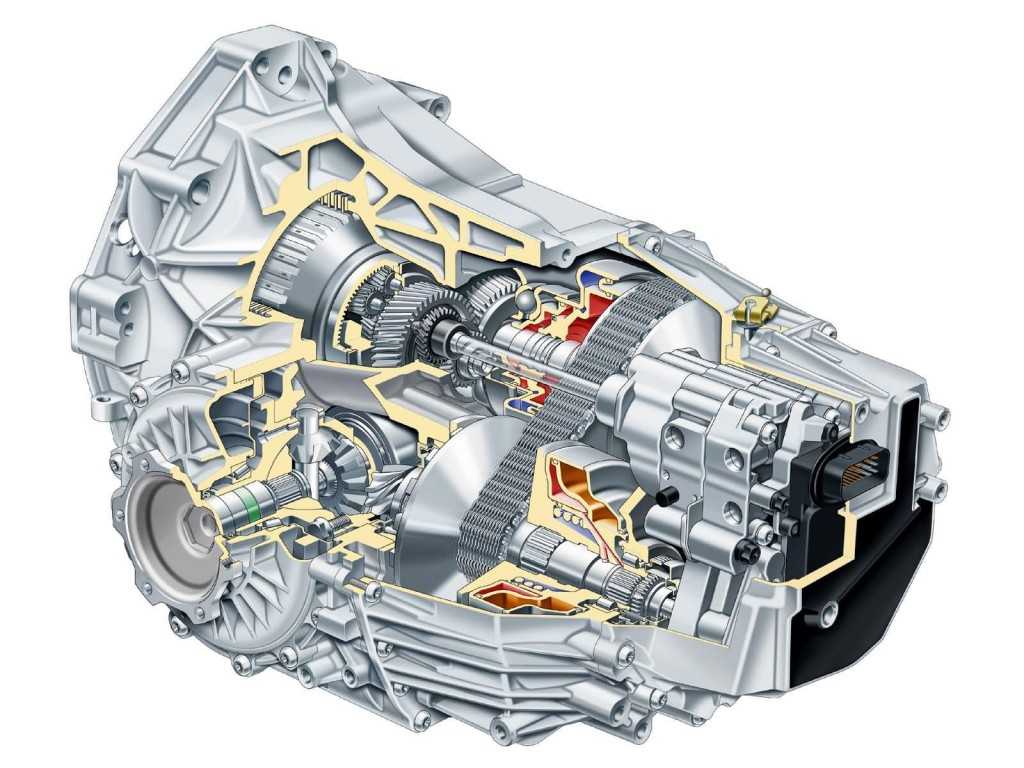 Хотя последние версии роботов уже давно избавлены от многих недостатков. Настолько, что если усадить в машину с роботом самого убеждённого их противника, он будет удивлён и даже заподозрит, что его обманывают, а на автомобиле стоит классический автомат.
Хотя последние версии роботов уже давно избавлены от многих недостатков. Настолько, что если усадить в машину с роботом самого убеждённого их противника, он будет удивлён и даже заподозрит, что его обманывают, а на автомобиле стоит классический автомат.
Именно так, современные коробки по потребительским качествам для среднего водителя настолько сравнялись, что сразу определить тип КПП довольно затруднительно. Едут они в спокойном режиме примерно одинаково, робот, DSG, гидроавтомат это, или даже вариатор, который научили имитировать дискретные переключения. Разницу можно выявить только замерами, где одни коробки переключаются быстрее, другие медлят, а у третьих подозрительно много ступеней. За какие свойства АКПП стоит переплачивать, а какие неважны — решать покупателю, которому теперь известно, роботизированная коробка передач, что это такое и чем она хороша.
Вам также будет интересно почитать:
Обзор оптимальной комбинации редуктора и промышленного робота
Назад к обзору
Какая коробка передач оптимальна для вашего робота? В этой статье мы перечислим большое количество различных (промышленных) роботов и привяжем их к оптимальной серии редукторов из программы Apex Dynamics. Мы объясняем, почему эта коробка передач хорошо подходит для этого типа робота.
Мы объясняем, почему эта коробка передач хорошо подходит для этого типа робота.
Слово «робот» впервые использовал чешский писатель Карел Чапек в своей пьесе R.U.R., что означает «Универсальные роботы Россума». Это было написано в 1920 и происходит от чешского слова robota, что означает «работа» или «обязательный труд». В этом разделе мы будем иметь дело только с промышленными роботами, которые в основном используются в промышленности. КОБОТ, робот, который работает вместе с людьми, и роботы в хирургии, домашнем хозяйстве, общественном питании и т. д., например, не учитываются.
Для каждого типа робота мы рекомендуем тип редуктора от Apex Dynamics с его наиболее важными характеристиками. В этой статье мы обсудим следующих промышленных роботов:
- Одиночный ремень или Н-образный мост
- Декартовский, декартовый, линейный или XYZ-робот
- Одиночная рука, шарнирная рука или роботизированная рука
- Дельта, параллельный или кинематический робот
- Машина с автоматическим управлением (AGV)
- Автономные мобильные роботы (AMR)
- Робот Скара
Редуктор для одноременного или Н-образного робота
Это 2-осевой портальный робот X/Z, состоящий из двойной направляющей в горизонтальной плоскости X и вертикальной оси Z. Ремень фиксируется и натягивается со стороны груза. Все это приводится в движение вращающимся ремнем, который остается связанным несколькими точками отклонения. Движение осуществляется двумя моторами. Координата лежит по диагонали к точкам перегиба оси X и оси Z. С помощью этой системы вы можете перемещать небольшие массы и, следовательно, можно достичь более высоких ускорений.
Ремень фиксируется и натягивается со стороны груза. Все это приводится в движение вращающимся ремнем, который остается связанным несколькими точками отклонения. Движение осуществляется двумя моторами. Координата лежит по диагонали к точкам перегиба оси X и оси Z. С помощью этой системы вы можете перемещать небольшие массы и, следовательно, можно достичь более высоких ускорений.
Оптимальная коробка передач для робота с одним ремнем или Н-моста относится к серии PAII.
Благодаря малой инерции редуктора достигается высокая динамика, при этом люфт оказывает незначительное влияние на точность. Это довольно простое решение, и именно здесь на помощь приходит экономичная серия.
Редуктор для декартового, линейного или XYZ-робота
Декартовый робот — это промышленный робот, три основные оси управления которого являются линейными (т. е. они движутся в прямая линия, а не вращающаяся) и перпендикулярны друг другу. Три оси соответствуют движениям вверх-вниз, вперед-назад и влево-вправо. Помимо других преимуществ, это механическое устройство упрощает решение для рычага управления роботом. Обладает высокой надежностью и точностью при работе в трехмерном пространстве. Как роботизированная система координат, она также эффективна для горизонтальных перемещений и штабелирования контейнеров.
Помимо других преимуществ, это механическое устройство упрощает решение для рычага управления роботом. Обладает высокой надежностью и точностью при работе в трехмерном пространстве. Как роботизированная система координат, она также эффективна для горизонтальных перемещений и штабелирования контейнеров.
Стандартный декартовый робот имеет 3 оси.
Какой редуктор?
Оптимальный редуктор для декартового, линейного или XYZ-робота относится к серии AF.
Низкий люфт и высокая жесткость, чтобы справиться с более высокой инерцией массы, а также прочный подшипник для восприятия высокой возникающей радиальной нагрузки.
Редуктор для одной руки, шарнирной руки или руки робота
Рука робота представляет собой механический манипулятор с функциональностью, аналогичной руке человека. Манипулятор робота состоит из ряда сегментов, соединенных друг с другом шарнирами, между которыми возможны перемещения и/или вращения. Эти части вместе образуют кинематическую цепь.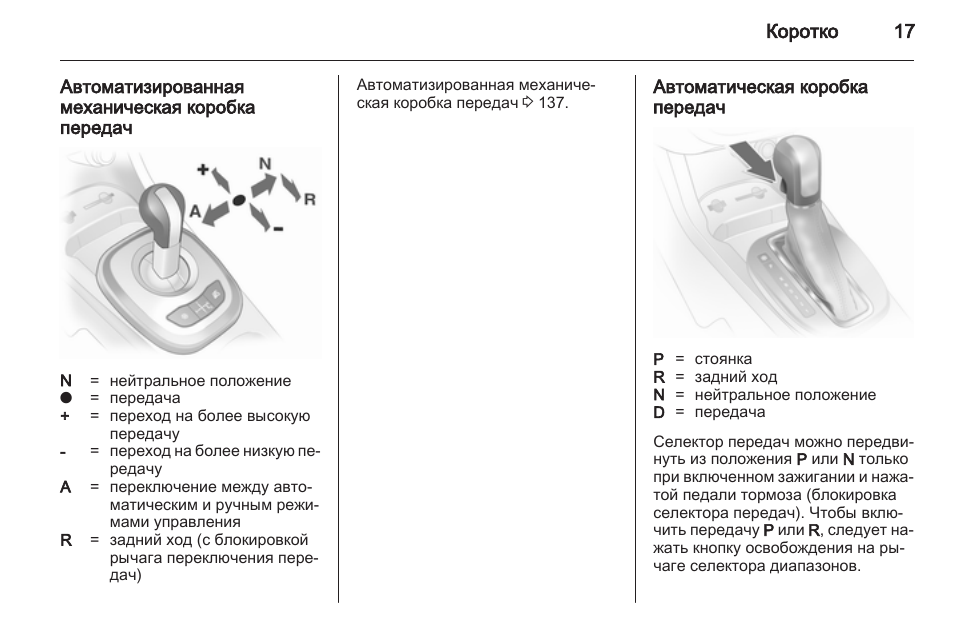 То, как части соединяются друг с другом и как они могут перемещаться между собой, определяет количество степеней свободы манипулятора робота.
То, как части соединяются друг с другом и как они могут перемещаться между собой, определяет количество степеней свободы манипулятора робота.
На конце манипулятора находится инструмент, который позволяет роботу выполнять задачу, например захватывать или поворачивать что-либо. Отдельно стоящий робот с шарнирно-сочлененной рукой часто имеет 6 свободных осей, если его поместить на гусеницу, у него будет 7 осей.
Оптимальный редуктор для робота с одной рукой, шарнирной рукой или роботом-манипулятором относится к серии AH.
Высокая точность для точности и высоких крутящих моментов. Редуктор имеет выходной фланец для дополнительной жесткости.
Редуктор для треугольного, параллельного или кинематического робота
Дельта-робот — это 3-осевой робот, подходящий для небольших рабочих зон и быстрых операций. Валы соединены общим шарниром выше и ниже рычагов для поддержания мощности и скорости. Первый дельта-робот был изобретен в начале 1980-х профессором Раймоном Клавелем и его командой в Федеральной политехнической школе Лозанны (Швейцария). Стандартный робот Delta имеет 3 оси, при центральном вращении он становится 4-осевым.
Стандартный робот Delta имеет 3 оси, при центральном вращении он становится 4-осевым.
T Оптимальный редуктор для треугольного, параллельного или кинематического робота относится к серии AP.
Чрезвычайно низкий люфт для предотвращения ошибок отслеживания, а также высокий крутящий момент и низкая инерция для высокодинамичных приводов.
Коробка передач для автоматически управляемого транспортного средства (AGV)
Автоматически управляемое транспортное средство — это мобильный робот, который использует маркеры, провода, магниты, лазер или другие инструменты для навигации. AGV часто используются в промышленности для перевозки материалов на заводе или складе. С конца 20 века AGV приобретают все большее значение в логистической отрасли.
Оптимальная коробка передач для автоматических транспортных средств (AGV) относится к серии PD/PL.
Поскольку это приложение не является сверхточным и имеет низкую динамику, достаточно средней точности. (Регулировка осуществляется с помощью маркеров) Большие подшипники могут воспринимать высокие радиальные нагрузки.
(Регулировка осуществляется с помощью маркеров) Большие подшипники могут воспринимать высокие радиальные нагрузки.
Коробка передач для автономных мобильных роботов (AMR)
Автономный мобильный робот — это тип робота, который способен понимать окружающую среду и перемещаться в ней самостоятельно. AMR отличаются от своих предшественников, автоматизированных управляемых транспортных средств (AGV), которые полагаются на гусеницы или заранее определенные пути и часто требуют наблюдения оператора.
AMR используют сложный набор датчиков, искусственный интеллект, машинное обучение и компьютеры для планирования маршрута, чтобы интерпретировать и перемещаться в окружающей среде, не полагаясь на проводное питание. Поскольку AMR оснащены камерами и датчиками, если они сталкиваются с неожиданным препятствием во время навигации, например, с упавшим ящиком или толпой людей, они будут использовать метод навигации, такой как предотвращение столкновений, чтобы замедлить, остановить или изменить маршрут вокруг объекта. а затем продолжить выполнение своей задачи.
а затем продолжить выполнение своей задачи.
Оптимальный редуктор для автономных мобильных роботов (AMR) относится к серии GL.
Поскольку точность должна быть выше, чем у AGV, мы выбрали серию GL за ее высокую точность, высокие радиальные нагрузки и компенсатор пускового момента. В результате отходящий шкив поворачивается в направлении, противоположном двигателю, и привод становится более управляемым.
Коробка передач для робота Scara
SCARA — это тип промышленного робота. Аббревиатура расшифровывается как Selective Compliance Assembly Robot Arm или Selective Compliance Articulated Robot Arm. Из-за параллельного направления оси SCARA рука немного гибкая в направлении X-Y, но жесткая в направлении Z, отсюда и термин «селективное соответствие». Это выгодно для многих типов сборочных работ, например, для вставки круглого штифта в круглое отверстие без блокировки. Второй особенностью SCARA является шарнирное, двухшарнирное расположение рук, подобное человеческим рукам, отсюда и часто используемый термин «шарнирный». Это позволяет вытягивать руку в ограниченном пространстве, а затем втягивать или «складывать». Это удобно при перемещении деталей из одной ячейки в другую или при загрузке или разгрузке остановленных технологических станций.
Это позволяет вытягивать руку в ограниченном пространстве, а затем втягивать или «складывать». Это удобно при перемещении деталей из одной ячейки в другую или при загрузке или разгрузке остановленных технологических станций.
SCARA, как правило, быстрее, чем сопоставимые декартовы роботизированные системы. Их одиночное крепление на пьедестал требует небольшой площади и обеспечивает простую и беспрепятственную форму монтажа. С другой стороны, SCARA могут быть дороже, чем сопоставимые декартовы системы, а управляющее программное обеспечение требует обратной кинематики для линейно интерполированных движений. Однако это программное обеспечение обычно входит в комплект поставки SCARA и обычно прозрачно для конечного пользователя.
Оптимальный редуктор для робота SCARA относится к серии AP.
Чрезвычайно малый люфт для точности, а также малая инерция для динамического контроля.
Этот обзор роботов, несомненно, неполный, а также существует множество подвариантов и экзотики. Однако должно быть ясно, что у Apex Dynamics всегда есть подходящее решение для 69 серий продуктов. Наши специалисты с удовольствием посоветуют вам подходящий редуктор для вашего применения. Не стесняйтесь связаться с нами.
Однако должно быть ясно, что у Apex Dynamics всегда есть подходящее решение для 69 серий продуктов. Наши специалисты с удовольствием посоветуют вам подходящий редуктор для вашего применения. Не стесняйтесь связаться с нами.
Коробка передач для колесного робота: дифференциалы и трансмиссия
Рекламное объявление
Двигатель постоянного тока может раскручиваться с довольно хорошей скоростью вращения. Но редуктор может изменить скорость вращения на более высокий крутящий момент. Вот руководство по выбору правильной коробки передач для колесного робота . Наша цель — сделать прочную конструкцию своими руками, чтобы сэкономить затраты в долгосрочной перспективе. Информация предоставляется, чтобы избежать различных преднамеренных плохих идей, распространяемых веб-сайтами потребительского уровня с магазином рядом с блогом. Мы пойдем к автомобильному дизайну, чтобы управлять колесами. Это проверено временем для работы в реальной жизни на обычной ровной поверхности.
Это проверено временем для работы в реальной жизни на обычной ровной поверхности.
Робототехника Люди устарели, они не увлекаются машинками на радиоуправлении. Они только добавляют схему над 4-х колесной коробкой. Их «коробка передач» — это не совсем то, что означает «коробка передач» в реальной жизни. Коробка передач означает трансмиссионную коробку передач. Ваш автомобиль имеет автоматическую коробку передач, ручную коробку передач и т. д., и вы управляете им. Если мы атакуем их машинки-роботы нашими радиоуправляемыми машинками, их автоматика развалится на части. Потому что наши машинки на радиоуправлении являются точной копией настоящей машины. Мы будем атаковать на первой передаче, чтобы нанести самый сильный удар и можем видеть через камеру.
Короче говоря, мы ожидаем, что вы знаете ноль, ваш фонд равен нулю, но вы будете покупать металл или детали из высокопрочных материалов для создания автопилота или, точнее, робота-автопилота. Этот робот будет работать.
Рекламное объявление
—
Ранее мы говорили о выборе шасси колесного робота. Постоянные читатели этого веб-сайта уже знают основы — базовый способ управления двигателем постоянного тока 3 В с помощью Arduino, несколько продвинутый способ управления двигателем постоянного тока 3 В с помощью Arduino и базовый способ использования светодиода в качестве датчика. Это руководство по выбору правильной коробки передач для колесного робота очень важно, так как вы можете использовать разные двигатели постоянного тока в зависимости от ваших потребностей . Мы исходим из того, что колеса представляют собой спущенные шины — как и в гоночных автомобилях F1, два колеса из четырех будут подключены к двигателю, и вспомним основную формулу (x используется для обозначения умножения), например:
Постоянные читатели этого веб-сайта уже знают основы — базовый способ управления двигателем постоянного тока 3 В с помощью Arduino, несколько продвинутый способ управления двигателем постоянного тока 3 В с помощью Arduino и базовый способ использования светодиода в качестве датчика. Это руководство по выбору правильной коробки передач для колесного робота очень важно, так как вы можете использовать разные двигатели постоянного тока в зависимости от ваших потребностей . Мы исходим из того, что колеса представляют собой спущенные шины — как и в гоночных автомобилях F1, два колеса из четырех будут подключены к двигателю, и вспомним основную формулу (x используется для обозначения умножения), например:
Мощность = крутящий момент x скорость
FinalTorque = TORQUEofMotor x gearRatio x gearEfiiciency
Правильный выбор редуктора для колесного робота: Комплект дифференциала осей колес
Прикрепление двигателей постоянного тока непосредственно к колесам — чертовски плохая идея для DIY Electronics, продающей проекты, включая Arduino, Adafruit и т. Д. Очевидно, они говорят это сознательно. Этот метод прямого добавления называется прямой передачей. Небольшие двигатели постоянного тока не рассчитаны на нагрузку изгиба, что является нормальным в случае непосредственного монтажа на колесе. Давать 50 грамм за такой дизайн даже нехорошо. Он не может работать 15 минут в день x 10 лет, если вы не используете его на стекле или хорошем полу.
Д. Очевидно, они говорят это сознательно. Этот метод прямого добавления называется прямой передачей. Небольшие двигатели постоянного тока не рассчитаны на нагрузку изгиба, что является нормальным в случае непосредственного монтажа на колесе. Давать 50 грамм за такой дизайн даже нехорошо. Он не может работать 15 минут в день x 10 лет, если вы не используете его на стекле или хорошем полу.
Это делается косвенно, чтобы моторы умирали быстрее. Самый простой способ — это спроектировать довольно просто, как игрушки с механической пружиной — два колеса будут соединены валом, а вал двигателя будет соединен с двигателем постоянного тока с помощью простого ремня. Это называется системой непрямой передачи. Это означает, что вал, удерживающий колеса, находится в совершенно другой плоскости, чем вал двигателя. Лента будет свободно двигаться, если на колеса будет воздействовать слишком большая нагрузка. Косвенно двигатель с меньшей вероятностью столкнется с аномальной нагрузкой. Так устроена ваша машина и с механической точки зрения. В противном случае вы не сможете применить тормоз, не будет системы подвески/пружины. Это называется дифференциалы в случае автомобиля с задним приводом.
В противном случае вы не сможете применить тормоз, не будет системы подвески/пружины. Это называется дифференциалы в случае автомобиля с задним приводом.
Теперь колеса будут вращаться с разной скоростью при повороте, общий пройденный путь будет разным для каждого колеса. Итак, давайте разобьем соединительный вал двух колес на левую и правую оси. Добавьте простую шестерню на внутреннем конце каждой оси, добавьте зубчатый венец под углом 90 градусов, чтобы соединить две отдельные оси с одним виртуальным валом. Теперь выходной вал вашего двигателя постоянного тока с коробкой передач должен стать еще одним длинным стержнем, который мы будем называть шестерней, с зубчатым концом, который мы будем называть шестерней, чтобы вращать зубчатый венец. Мы можем добавить две боковые шестерни на зубчатый венец, чтобы сделать их безупречными. Это называется «Усовершенствованный комплект снаряжения» в миниатюрном мире или мире масштабных моделей. Так работают все нормальные заднеприводные автомобили. Вот как знания могут снизить стоимость — один двигатель постоянного тока 3 В может фактически привести в действие базовое шасси колесного робота DIY. На самом деле у Lego есть эта полная система в пластиковой форме — Lego Differential Kit. Когда вы будете искать робототехнику, вы будете искать «Комплект дифференциала моста». Это анимированное изображение радиоуправляемой машины Tamiya : 9.0003
Вот как знания могут снизить стоимость — один двигатель постоянного тока 3 В может фактически привести в действие базовое шасси колесного робота DIY. На самом деле у Lego есть эта полная система в пластиковой форме — Lego Differential Kit. Когда вы будете искать робототехнику, вы будете искать «Комплект дифференциала моста». Это анимированное изображение радиоуправляемой машины Tamiya : 9.0003
Полноприводные системы неполного привода в автомобилях не имеют дифференциала между передними и задними колесами. В обычном шасси колесного робота потребительского класса используется конструкция переднеприводного автомобиля.
Выбор подходящего редуктора для колесного робота: комбинация двигателя и зубчатой передачи
Для выбора подходящего редуктора для колесного робота и двигателя необходимо учитывать следующие моменты:
Какая типичная необходимая мощность? Большинство двигателей классифицируются в зависимости от их мощности. Самый маленький, самый легкий, самый недорогой двигатель, который соответствует требованиям, должен быть выбран. Напряжение является еще одним важным решающим фактором, так как для батареи с более высоким напряжением потребуется большая (и тяжелая) батарея.
Напряжение является еще одним важным решающим фактором, так как для батареи с более высоким напряжением потребуется большая (и тяжелая) батарея.
Мы можем оптимизировать конструкцию для максимальной эффективности преобразования электрической энергии в механическую для экономии электроэнергии. Двигатели обычно наиболее эффективны при преобразовании электрической энергии в механическую на высоких скоростях. Коробки передач с большими передаточными числами обычно имеют более низкий КПД, чем коробки передач с меньшими передаточными числами.
Эффективность преобразования электрической энергии в механическую обычно не имеет значения.
Часть механической мощности, создаваемой двигателем, идет на ускорение ротора самого двигателя, а часть — на ускорение нагрузки. Затем нам нужно выбрать редуктор для двигателя, чтобы мы могли достичь комбинации скорости и крутящего момента.
Мы можем разделить зубчатые колеса на определенные типы – прямозубые, реечные, конические, косозубые, червячные, планетарные, шарико-винтовые/ходовые и гармонические. В роботах распространены три типа зубчатых передач: гармонический привод, планетарный привод и циклодальный привод.
В роботах распространены три типа зубчатых передач: гармонический привод, планетарный привод и циклодальный привод.
Правильный выбор редуктора для колесного робота: размерная характеристика двигателей постоянного тока
Очень важно знать терминологию, связанную с размерной характеристикой двигателей постоянного тока, и ключевой фактор, который эта терминология играет для реального управления колесным шасси. с нагрузкой. Их —
Скорость в об/мин, крутящий момент, напряжение, ток, эффективность, звуковой шум, электрический шум, масса и размер. Обсуждение этих моментов выходит за рамки этой статьи.
Выбор подходящей коробки передач для колесного робота: мотор-редуктор постоянного тока слишком упрощенное решение
Мотор-редуктор имеет отдельную камеру с видимой формой в виде прямоугольной коробки или цилиндра перед двигателем постоянного тока. Весь блок продается для роботов DIY потребительского уровня. Gearhead слишком упрощен и, вероятно, великолепен.
Дешевые мотор-редукторы постоянного тока продаются с такими терминами, как «редукторный двигатель постоянного тока», «редукторный двигатель постоянного тока» на Ebay, Amazon и т. д. Они обычно имеют диапазон 100–150 об/мин и стоят от 2 до 10 долларов. Отлично подходит для базовых работ. Мы не думаем, что вы даже думаете об этом варианте, поскольку вы поняли основы.
Выбор правильной коробки передач для колесного робота: реальная 5-ступенчатая коробка передач
Идеальный четырехколесный роботизированный автомобиль с задним приводом будет иметь настоящий дифференциал колес, 4-ступенчатую коробку передач с возможностью управления передачей для выбора правильного передаточного числа в подходящая ситуация, такая как настоящий автомобиль с ручным приводом и отдельная система рулевого управления передними колесами. Да, у Лего есть коробка передач — 5-ступенчатая коробка передач Лего! У Тамии тоже есть Лего. Да, дело пойдет в сторону масштабных моделей автомобилей. В радиоуправляемых (или радиоуправляемых) машинах есть все. Электрические машинки на радиоуправлении воспринимаются как «плохие» (смеется), дети играют с ними. Мы пожилые люди, у нас должен быть четырехтактный двигатель с хорошими тормозами.
В радиоуправляемых (или радиоуправляемых) машинах есть все. Электрические машинки на радиоуправлении воспринимаются как «плохие» (смеется), дети играют с ними. Мы пожилые люди, у нас должен быть четырехтактный двигатель с хорошими тормозами.
Переключение передач с собачкой и другие способы переключения передач.
Выбор правильной коробки передач для колесного робота: RC Car Robotics
По многим причинам радиоуправляемые машинки лучше всего подходят для создания колесных роботов. От покрышек, подвесок – у всего есть запасные части, Радиоуправляемые машинки не для детей, серьезные взрослые рассказывают о них на нескольких сотнях интернет-форумов. Люди там будут шутить над вами, если вы вдруг спросите о том, как добавить двигатель постоянного тока, минуя двигатель, работающий на топливе. Вы должны научиться сами строить из шасси. Если вы введете в поиск «Tamiya Type-S Chassis Kit», вы получите представление о настоящем четырехколесном роботизированном шасси.
Изначально вы хотели создать идеального колесного робота. Вместо того, чтобы жертвовать деньги производителям электроники, которые также производят шестерни, надежнее полагаться на компанию-производителя радиоуправляемых автомобилей с большой пользовательской базой. Если колесо этого робота-производителя электроники DIY сломается, у вас есть два варианта — купить полную вещь или купить набор из 4 колес. Но автомобиль с радиоуправлением продает все как отдельные детали, как продавец автомобилей, плюс есть сторонние производители запчастей. Он легко прослужит более 2 десятилетий при хорошем уходе.
Кроме того, подвески/пружины и другие детали обеспечат долговечность платы и других электронных комплектов. Вы будете работать так, чтобы вы могли вынуть доску и использовать ее для других проектов. Вы этого не видите, так что это гибкий вопрос. Даже платить 10 долларов за пластиковую коробку передач фактически бесполезно. При высокой нагрузке зубья могут сломаться. Машинки на радиоуправлении созданы для того, чтобы справляться со странными ситуациями в реальном мире.