Содержание
Роботизированные трансмиссии с двумя сцеплениями
Роботизированные трансмиссии с двумя сцеплениями
29 ноября, 2022 admin
Все чаще на рынке можно встретить автомобили оснащенные роботизированной трансмиссией с двумя сцеплениями, у которой есть свои плюсы и минусы, о них мы поговорим в дальнейшем. Многие автомобильные эксперты считают, что за таким типом коробок передач будущее, в пример можно привести VAGовскую роботизированную трансмиссию DSG-6. Ее экономичность и быстрое переключение передач подкупила многих автолюбителей по всему миру. Затем на рынке появилась DSG-7, которая прославилась своей ненадежностью и многие отказались от покупки автомобилей концерна VAG именно из-за боязни поломки и дальнейшего, достаточно дорогого ремонта.
Первый в истории робот с двумя сцеплениями
Отсчётом можно считать 1939 год, инженер Адольф Кегресс сконструировал прототип трансмиссии с двойным сцеплением, но к сожалению из-за недостатки финансирования, его труды не увенчались успехом и работа была заморожена почти на 40 лет.
Первым в истории автомобилем, который должен был обзавестись роботизированной коробкой передач с двумя сцеплениями, должен был стать Citroen Traction Avant. Это переднеприводный автомобиль с несущим кузовом, за все время производства появилось немалое количество вариантов исполнения кузова: четырёхдверный седан, двухдверное купе, двухдверный кабриолет и пятидверный хэтчбек.
Воплотить идею Адольфа Кегресса в жизнь удалось инженерам из Porsche, грубо говоря обкатывать новую технологию стали на автомобилях 956 и 962C, предназначенных для кольцевых гонок. Но из-за большого веса, значительных габаритов и главное ненадежности, данная кпп в серийное производство не пошла и ее использование не вышло за пределы трека. В 1985 году попытки доработать трансмиссию предпринимали инженеры Audi установив коробку на раллийный автомобиль Sport quattro S1, к слову автомобилю удалось выиграть в американских соревнованиях по скоростному подъему на гору Пайкс-Пик.
В серийное производство, роботизированная трансмиссия поступила относительно недавно, первопроходцем стала компания Volkswagen установив преселективную трансмиссию на спортивный хэтчбек Golf Mk4 R32, произведенной компанией BorgWarner. Так что отсчетом появления роботизированной коробки для серийных автомобилей можно считать 2003 год. Следующим автомобилем получившим DSG стало немецкое купе Audi TT. Причем первые версии Direct Shift Gearbox (DSG) устанавливались на автомобили с поперечным расположением двигателя. Начиная с конца 2008 года, автомобили марки Audi получили собственную коробку с двойным сцеплением под названием S Tronic, которая устанавливалась на версии с продольным расположением мотора.
Так что отсчетом появления роботизированной коробки для серийных автомобилей можно считать 2003 год. Следующим автомобилем получившим DSG стало немецкое купе Audi TT. Причем первые версии Direct Shift Gearbox (DSG) устанавливались на автомобили с поперечным расположением двигателя. Начиная с конца 2008 года, автомобили марки Audi получили собственную коробку с двойным сцеплением под названием S Tronic, которая устанавливалась на версии с продольным расположением мотора.
Какие бывают роботизированные коробки передач с двумя сцеплениями
Их можно разделить на два типа:
- с мокрым сцеплением;
- с сухим сцеплением.
Как правило первый вариант используется на более мощных двигателях, крутящий момент которых превышает 350 Нм. Для того чтобы развеять миф ненадежности таких кпп, приведем в пример Bugatti Veyron, DCT на котором справляется с мощностью мотора в 1 250 Нм крутящего момента. Среди роботизированных трансмиссий устанавливаемых на автомобили марки Audi и Volkswagen, самым надежным роботом считается DSG-7 DQ500, в стоке способная «переварить» до 600 Нм крутящего момента.![]() Трансмиссии с сухим сцеплением устанавливаются в основном на автомобили с маломощными двигателями, не превышающими отметку в 250 Нм крутящего момента.(полный список автомобилей с дсг 7)
Трансмиссии с сухим сцеплением устанавливаются в основном на автомобили с маломощными двигателями, не превышающими отметку в 250 Нм крутящего момента.(полный список автомобилей с дсг 7)
Помимо Audi и Volkswagen еще несколько компаний оснащающие свои машины подобного типа коробками:
- Lamborghini — компания использует 7-ми ступенчатый робот под названием Lamborghini Doppia Frizione (LDF). Устанавливается на модель Huracán LP610-4 2014 модельного года с 5.2 литровым силовым агрегатом V10 мощностью 610 л.с. и 560 Нм. крутящего момента. Важно отметить, Lamborghini Doppia Frizione (LDF) позволяет использовать функцию Launch Control для максимально быстрого ускорения при разгоне с места.
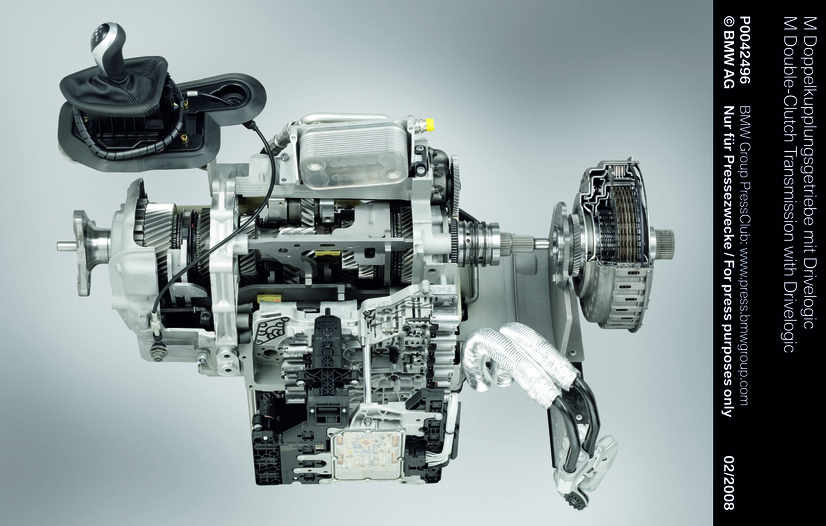
- BMW — в 2008 году баварский производитель вывел на рынок M3 с коробкой производства Getrag, с двойным сцеплением от BorgWarner, получившей название M double-clutch transmission (M DCT). Затем она устанавливалась на модель Z4 второго поколения в версиях (sDrive35i и sDrive35is) и еще ряде моделей включая 135i.
 С 2014 года 7-ми ступенчатый робот (DCT) устанавливается на M3 в кузове F80 и М4 соответственно в кузове F82.
С 2014 года 7-ми ступенчатый робот (DCT) устанавливается на M3 в кузове F80 и М4 соответственно в кузове F82. - Mercedes-Benz использует 7-ступенчатую SpeedShift трансмиссию производства Getrag, устанавливая ее на модель SLA AMG, тот же блок DCT используется на модели Ferrari California. У компании Mercedes-Benz имеются и собственные разработки 7-ми ступенчатой коробки с двойным сцеплением, которая устанавливается на модели CLA 250 и GLA250.
- Ford — начиная с 2008 года PowerShift с мокрым сцеплением устанавливается на модели Focus и C-Max. DCT произведена Ford Motor Company в сотрудничестве с Getrag и LUK. Есть еще один вариант PowerShift с сухим сцеплением, он менее надежен но его стоимость значительно ниже, стоимости варианта с мокрым сцеплением. Данная кпп также встречается на Volvo S60.
- Acura — DCT с 9-тью передачами устанавливается на суперкар NSX.
- KIA/Hyundai — корейские производители также решили устанавливать на свои модели роботы с двойным сцеплением (DCT), одной из первых таких моделей стал CEE’D GT. В планах компании установка данной кпп на модели Pro CEED GT, CEED Koup и еще несколько моделей не продающихся в нашей стране. Главными преимуществами робота с двойным сухим сцеплением является его экономичность и быстрое переключение передач. Hyundai устанавливает (EcoShift) на Veloster, Veloster Turbo, Sonata, i30 и Tucson.
- Mitsubishi — для своих спортивных моделей Lancer Evolution X и Lancer Ralliart, компания использует спортивную коробку передач с двойным сцеплением, под названием Twin Clutch SST. Достоинствами TC-SST можно считать быстрое переключение пердач, позволяющее снизить время разгона.
- Nissan — несложно догадаться, что DCT устанавливается на GT-R, который на сегодняшний день является одним из лучших в своем классе автомобилей. На спорткаре установлена 6-ступенчатая роботизированная коробка передач BorgWarner (DCT GR6) с двойным сцеплением. Переключение передач происходит за 0.15 секунд.
- Porsche — изначально подобного рода коробки передач устанавливались исключительно на спортивные автомобили, они были разработаны в сотрудничестве с ZF Friedrichshafen AG. Гражданские модели получили Porsche Doppelkupplungsgetriebe (PDK), достаточно надежные и очень шустрые.
- Peugeot/Citroen — одни из немногих, кто первыми стали устанавливать роботов на кроссоверы (Peugeot 4007 и Citroen C-Crosser). Автоматическая 6-ступенчатая коробка передач DCS с двумя сцеплениями устанавливается на модификации с 2.2 HDi 156 л.с. и 389 Нм крутящего момента.
- Renault — французская компания также не упустила шанс испробовать современную технологию, в результате чего в 2010 году появился Megane с роботизированной коробкой с двойным сухим сцеплением EDC DC 4
 С 2014 года 7-ми ступенчатый робот (DCT) устанавливается на M3 в кузове F80 и М4 соответственно в кузове F82.
С 2014 года 7-ми ступенчатый робот (DCT) устанавливается на M3 в кузове F80 и М4 соответственно в кузове F82. В планах компании установка данной кпп на модели Pro CEED GT, CEED Koup и еще несколько моделей не продающихся в нашей стране. Главными преимуществами робота с двойным сухим сцеплением является его экономичность и быстрое переключение передач. Hyundai устанавливает (EcoShift) на Veloster, Veloster Turbo, Sonata, i30 и Tucson.
В планах компании установка данной кпп на модели Pro CEED GT, CEED Koup и еще несколько моделей не продающихся в нашей стране. Главными преимуществами робота с двойным сухим сцеплением является его экономичность и быстрое переключение передач. Hyundai устанавливает (EcoShift) на Veloster, Veloster Turbo, Sonata, i30 и Tucson. Гражданские модели получили Porsche Doppelkupplungsgetriebe (PDK), достаточно надежные и очень шустрые.
Гражданские модели получили Porsche Doppelkupplungsgetriebe (PDK), достаточно надежные и очень шустрые.И это далеко не полный список, новую технологию внедряют китайские производители на BYD и Qoros, немецкие на Smart и прочие.
Как устроена роботизированная коробка передач и принципы ее работы
Прежде всего, для ознакомления предлагаем посмотреть видео на данную тему
Вся конструкция состоит из (речь идет о кпп с масляной ванной):
- первичного вала четных передач;
- первичного вала нечeтных передач и заднего хода;
- масляного насоса;
- двойного сцепления;
- гидравлического механизма переключения;
- датчика включенной передачи;
- масляного фильтра;
- электрогидравлического блока.
Об основных отличиях мокрого сцепления от сухого мы поговорим в следующий раз, сегодня речь пойдет об общем устройстве трансмиссий такого типа. Данная коробка представляет собой механическую кпп с системой управления передач и сцеплением фрикционного типа. Главным преимуществом можно считать два ряда передач , каждый из которых соединен с маховиком двигателя через собственное сцепление. Первый ряд отвечает за нечетные передачи и задний ход, второй соответственно за четные. Не будем углубляться в терминологию, проще говоря пока автомобиль едет на нечетной передачи, коробка уже держит включенной следующую передачу, но без подачи момента. Как только происходит переход на следующую передачу, диски первого сцепления размыкаются, а другого — наоборот, смыкаются. Отсюда и более плавный ход и ощущение постоянного ускорения.
Плюсы и минусы роботизированных трансмиссий с двумя сцеплениями
Начнем с преимуществ:
- экономичность, одно из главных достоинств данных трансмиссий, причем стоит отметить, что показатели расхода топлива на версиях с сухим сцеплением ниже, чем на мокрых;
- плавность хода. Из-за особенности переключения передач, которые идут одна за одной удалось полностью избавиться от легких толчков, которые присуще классическому автомату;
- динамика;
- возможность выбрать режим работы трансмиссии ;
 Из-за особенности переключения передач, которые идут одна за одной удалось полностью избавиться от легких толчков, которые присуще классическому автомату;
Из-за особенности переключения передач, которые идут одна за одной удалось полностью избавиться от легких толчков, которые присуще классическому автомату;Теперь поговорим о недостатках
- одним из главных является ненадежность и выход из строя мехатроника. По большей части это проблема DSG-7;
- дорогая в ремонте и обслуживании;
- чувствительна к тяжелым дорожным условиям.
- металлический лязг при проезде лежачих полицейских или неровностей (речь о DSG-7)
- стоимость производства роботизированной трансмиссии с двумя сцеплениями достаточно дорога.
Выводы
Из всего вышеуказанного можно сделать вывод о том, что с каждым годом все больше производителей пытается освоить для себя новый тип трансмиссий и список моделей оснащенных преселективной коробкой передач будет только увеличиваться. Как и у любой трансмиссии у DSG есть свои плюсы и минусы.![]() Если вы являетесь первым владельцем авто и оно на гарантии, то можно ни о чем не беспокоиться, а вот покупая автомобиль на вторичном рынке нужно быть предельно внимательным, особенно если речь идет о DSG-7, особенно DQ200, которая считается самой проблемной из всех. За остальными кпп таких существенных проблем замечено не было, но как говориться раз на раз не приходится и во многом надежность зависит от самого водителя и стиля езды.
Если вы являетесь первым владельцем авто и оно на гарантии, то можно ни о чем не беспокоиться, а вот покупая автомобиль на вторичном рынке нужно быть предельно внимательным, особенно если речь идет о DSG-7, особенно DQ200, которая считается самой проблемной из всех. За остальными кпп таких существенных проблем замечено не было, но как говориться раз на раз не приходится и во многом надежность зависит от самого водителя и стиля езды.
[PDF] Компактные редукторы для современной робототехники: обзор
- title={Компактные редукторы для современной робототехники: обзор},
автор = {Пабло Л {\ ‘о} пез-Гарк {\ ‘и} а, Стейн Криспель, Элиас Серенс, Том Верстратен и Дирк Лефебер},
journal={Рубежи робототехники и ИИ},
год = {2020},
громкость={7}
}- Пабло Лопес-Гарсия, Штейн Криспель, Д. Лефебер
- Опубликовано 14 августа 2020 г.
- Информатика
- Границы робототехники и ИИ
Накануне того, как взаимодействие человека и робота (HRI) станет привычным в нашей жизни, производительность роботизированных устройств HRI по-прежнему сильно зависит от их редукторов.
. В большинстве промышленных роботов обычно встречаются две относительно нетрадиционные технологии передачи — Harmonic Drives© и Cycloid Drives, которые не так широко используются в других отраслях. Понимание происхождения этой сингулярности дает ценную информацию для поиска подходящих будущих технологий роботизированной трансмиссии. В… См. в PubMed
frontiersin.org
R2poweR: проверка концепции редуктора с обратным приводом и высоким передаточным числом для совместной работы человека и робота*
Инженеры-робототехники сталкиваются с серьезными трудностями при решении сложных задач приведения в действие совместной работы человека и робота с действующими роботизированными коробками передач. Доступные технологии включают планетарные передачи с высоким передаточным числом…
Новый редуктор на основе Wolfrom для приводов роботов
Представлен новый тип составных планетарных зубчатых передач, основанный на топологии Wolfrom, который можно использовать для повышения производительности редуктора в целом.
, т. е. увеличить его эффективность, уменьшить его инерцию, увеличить его крутящий момент и т. д.Разработка прототипа и анализ эффективности нового привода робота на основе топологии 3K-H-V
- Ле Ци, Дапэн Янг, Хун Лю
Материаловедение, машиностроение
- — приводы напрямую влияют на производительность роботов роботов, а приводы роботов напрямую влияют на работу приводов роботов. С развитием робототехники к роботам предъявляются более высокие требования…
Проектирование, исследование и экспериментальная характеристика роботизированного манипулятора с 6 степенями свободы, приводимого в действие полуделокализованными магнитореологическими приводами с тросовым приводом
Коллаборативные роботы должны тесно и безопасно работать с пользователями, будучи быстрыми и сильными. Удовлетворение обеих этих потребностей одновременно представляет собой серьезную проблему, если не препятствие, для…
3D-печать циклоидальной передачи с малым передаточным числом для робототехники
- W. Roozing, G. Roozing
Engineering, Computer Science
2022 IEEE /RSJ Международная конференция по интеллектуальным роботам и системам (IROS)
- 2022
В этой работе предлагается компактная циклоидальная передача с низким передаточным числом, которую можно распечатать на 3D-принтере и в сочетании с готовыми компонентами, что представляет огромный потенциал для реализации с высоким соотношением производительности и стоимости.
Исследование точности манипулятора робототехнического комплекса, построенного на базе циклоидальной передачи
Математическая модель построения передачи и определение точности поворотного узла для наземного робототехнического комплекса, с использованием циклоидальной передачи без промежуточной исследуются и разрабатываются тела качения, что позволяет повысить технический уровень робототехнических комплексов.
Дизайн и характеристика распечатанных на 3D-принтере приводов с открытым исходным кодом для передвижения ног
Впечатляющие возможности передвижения животных обусловлены совместной эволюцией морфологии скелета и мышечных свойств.
Производительность роботов на ногах также, вероятно, выиграет от…Увеличение передаточного числа передачи энергии с помощью миниатюрной циклоидальной коробки передач для гуманоидов
Проблемы проектирования возникают в таких приложениях, как гуманоиды, где требуется высокий крутящий момент для перемещения и самобалансировки бота. Настоящее исследование сосредоточено на разработке циклоидального редуктора для гуманоидных…
Интеграция и тестирование высокомоментного шарнира с сервоприводом и его электронного контроллера с применением в прототипе экзоскелета верхней конечности
- M. Vélez-Guerrero, M. C. Cuervo, S. Mazzoleni
Engineering
- Датчики1
- 2021
- 0
В заключение и на основании полученных результатов, шарнир с сервоприводом и его система управления демонстрируют стабильную работу в соответствии с предложенным протоколом испытаний, что позволяет использовать этот подход в различных приложениях, связанных с роботизированными экзоскелетами, включая повышение производительности человека, реабилитация или поддержка повседневной жизнедеятельности.
Планетарный редуктор, напечатанный на 3D-принтере для шарниров роботизированной руки
Технология 3D-печати стала очень популярной в последние несколько лет как дешевый способ изготовления различных деталей. 3D-печать является идеальным инструментом для прототипирования различных, в основном сложных,…
ПОКАЗЫВАЕТСЯ 1-10 ИЗ 103 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантностьНаиболее влиятельные статьиНедавность
Настройка планетарных зубчатых передач для помощи и воспроизведения человеческих конечностей
- . L.Garía P. 9001 Криспель, Т. Верстратен, Элиас Серенс, Б. Вандерборхт, Д. Лефебер
Engineering
MATEC Web of Conferences
- 2019
В этом документе представлены прототип и связанные с ним первые результаты испытаний концепции Wolfrom alpha-I, новой концепции, которая демонстрирует прикладной потенциал планетарных зубчатых передач на основе Wolfrom.
в приводе HRI и раскрывает потенциал практически неиспользованного вида планетарных зубчатых передач.Подшипниковый привод: новый компактный привод для роботизированных шарниров
- Elias Brassitos, C. Mavroidis, B. Weinberg
Engineering
- 2013
Передовая робототехника требует нового поколения приводов, способных демонстрировать ряд желательных характеристик, начиная от высокой удельной мощности и высокой эффективности, высокого позиционирования разрешение, высокое…
Легкий робот DLR: концепции проектирования и управления роботами в среде человека
- A. Albu-Schäffer, S. Haddadin, C. Ott, A. Stemmer, T. Wimbock, G. Hirzinger
Информатика
Инд. Робот
- 2007
Представлена первая систематическая экспериментальная оценка возможных травм во время столкновений робота с человеком с использованием стандартизированных испытательных установок, а также последовательный подход к использованию этих датчиков для манипуляций в среде человека.
описан.Представление составных планетарных передач (C-PGT): компактный способ достижения высоких передаточных чисел для носимых роботов
Показано, что механизм C-PGT может обеспечивать передаточное число до 1:600, выдерживая выходной крутящий момент 100 Нм, и такой подход приводит к большим и тяжелым коробкам передач, когда требуется высокий крутящий момент.
Требования к безопасным роботам: измерения, анализ и новые идеи
Дан обзор систематической оценки безопасности при взаимодействии человека и робота, охватывающий различные аспекты наиболее значимых механизмов травм, включая проблему квазистатического ограниченного воздействие, которое при определенных обстоятельствах может представлять серьезную угрозу для человека даже для малоинерционных роботов.
Использование динамики естественной нагрузки с приводами с переменным передаточным числом
Результаты показывают, что активное изменение передаточного числа с использованием предложенных алгоритмов управления может привести к уменьшению на порядок необходимых крутящего момента и мощности привода, а также повысить устойчивость к возмущениям.
Оптимизация трансмиссии для промышленных роботов
В этом документе представлена стратегия оптимизации для поиска компромисса между стоимостью, сроком службы и производительностью при проектировании трансмиссии, т. е. редукторов и электродвигателей, для новых концепций роботов, и показано, как Задача проектирования может быть формализована как задача оптимизации.
Новый подход к созданию дружественных человеку роботов
- М. Зинн, Бернард Рот, О. Хатиб, Дж. Солсбери
Инженерия
Международная конференция IEEE по робототехнике и автоматизации, 2004 г. Труды. ИКРА ’04. 2004
- 2004
Благодаря резкому уменьшению эффективного импеданса манипулятора при сохранении высокой частоты крутящего момента показано, что конкурирующие конструктивные требования к производительности и безопасности могут быть успешно интегрированы в единую манипуляционную систему.
Обзор принципов энергоэффективного передвижения роботов
- Навваб Кашири, Энди Абате, Н. Цагаракис
Инженерное дело
Фронт. Робот. AI
- 2018
Рассмотрен ряд подходов к управлению, позволяющих обеспечить энергоэффективное передвижение роботов за счет использования естественной динамики системы и использования оптимальных подходов к управлению, ориентированных на затраты на передвижение.
Законы масштабирования для роботизированных трансмиссий
В чем разница между приводами с редуктором и приводом с прямым приводом?
Загрузите эту статью в формате PDF.
В наши дни развитие робототехники ускоряется, поскольку компании ищут способы создавать новые решения для повседневных проблем. Роботы становятся умнее за счет процессов обучения искусственного интеллекта (ИИ), более динамичными в движении благодаря дизайну и более эффективными в промышленных приложениях.
Тем не менее, актуаторы, похоже, упускают из виду, когда речь заходит об их потребности в инновациях.Основы приводов
Приводы — это компонент, отвечающий за обеспечение движения и силы в суставах и осях машины, такой как робот. Ключевым фактором в работе машины является управляющий сигнал и потребляемая мощность для облегчения движения. Однако вам также необходимо преобразовать мощность двигателя в полезную скорость и крутящий момент. Подумайте о шестеренках на велосипеде. Ваша нога может быть недостаточно сильной, чтобы управлять рулем велосипеда напрямую. Шестерни используются для изменения крутящего момента, необходимого для привода колеса.
То же самое относится и к исполнительным механизмам роботов, где традиционная комбинация двигателя и редуктора работает вместе для преобразования более низкого выходного крутящего момента двигателя для достижения мощного движения в манипуляторе робота с полезной скоростью. Чем сложнее система зубчатых передач (т.
е. чем выше передаточное число или больше ступеней), что обычно требуется для приложений с более высоким крутящим моментом, тем больше люфт в системе трансмиссии. Люфт повлияет на точность робота, а в крайних случаях может даже повлиять на безопасность.Люфт – это «люфт» в системе, также называемый «люфтом» в шестернях (рис. 1) . Например, при перемещении руля старой машины влево и вправо, когда машина заглушена и нет гидроусилителя руля, вы можете почувствовать некоторый «люфт» или люфт в системе, когда руль двигается, а шины нет. повернуть. Это связано с тем, что вдоль системы рулевого управления многие разъемы с небольшим, допустимым люфтом складываются в общий большой люфт в системе, который можно почувствовать.
1. Люфт – это «люфт» в системе, также называемый «люфтом» в шестернях.
Устранить люфт в редукторной системе очень сложно, а в многоступенчатых редукторах практически невозможно. Шестерни должны быть изготовлены с очень плотной посадкой или допуском, что может быть дорогостоящим.
Кроме того, жесткие допуски приводят к высокому трению, или необходим механизм, обеспечивающий плотное зацепление шестерен во всем диапазоне крутящего момента.Гибкие зубчатые передачи, такие как зубчатые передачи, предлагают еще один метод устранения люфта, поскольку редуктор имеет несколько гибких компонентов, компенсирующих «люфт». К сожалению, это может привести к потенциальной хрупкости и сделать обратное движение — управление устройством в обратном направлении — очень сложным.
Приводы с редуктором подходят для низкоскоростных приложений, поскольку они позволяют двигателям работать с высокой скоростью и меньшим крутящим моментом в «наилучшей зоне» эффективности. Это также позволяет системе использовать распространенные сегодня двигатели с относительно низким крутящим моментом (более слабые).
Самый простой тип зубчатого колеса — цилиндрическое зубчатое колесо, в котором зубья зубчатого колеса входят в полный контакт при каждом зацеплении, вызывая сильный шум и приводя к износу и часто к необходимости смазки.
Проблема шума привела к созданию винтовой шестерни, которая позволяет зубьям входить в зацепление более плавно. Когда мы меняем передаточное число для увеличения крутящего момента, это происходит за счет снижения скорости. Это связано с тем, что двигатель, приводящий в движение коробку передач, снижает выходную скорость для увеличения крутящего момента. Вот почему редукторы также часто называют редукторами.Привод с прямым приводом
В приводе с прямым приводом традиционная коробка передач удалена. Однако для этого требуется, чтобы двигатель в приводе с прямым приводом мог создавать достаточный собственный крутящий момент на полезной скорости (т. Е. Не тысячи об / мин, а несколько сотен об / мин). Преимущества прямого привода многочисленны, и это давно было мечтой производителей роботов.
Прямой привод не имеет люфта, так как отсутствуют шестерни; жесткость на кручение обеспечивает очень высокую точность. Прямой привод также является полностью обратным, что обеспечивает большие преимущества для коллаборативных роботов, которые должны перемещаться и позиционироваться людьми.
Кроме того, высокая ударопрочность делает их очень подходящими для экзоскелетов и шагающих роботов, где удары при ходьбе могут повредить шестерни.2. Приводы с прямым приводом, такие как показанный здесь LiveDrive, полностью устраняют необходимость в зубчатой передаче, что приводит к меньшему общему весу и меньшему количеству движущихся частей. Эти компоненты могут быть произведены с низкой стоимостью — более 50% стоимости традиционного привода с редуктором.
Кроме того, отсутствие редуктора означает отсутствие инерции, что является важным преимуществом с точки зрения безопасности в роботах и машинах. Если автомобиль начинает катиться вниз по склону, накопленная инерция затрудняет быструю остановку. То же самое происходит и с коробкой передач: если у вас есть двигатель, работающий со скоростью 4000 об/мин, и коробка передач с передаточным числом 100:1, мгновенная остановка невозможна. Коробке передач нужно время, чтобы замедлиться.
Преимущества также распространяются на внедрение робототехнических решений.
Люфт в редукторных системах часто требует сложного программирования, чтобы повысить точность и компенсировать «люфт» в шестернях. Это требует времени и часто нуждается в постоянной повторной калибровке. Шестерни также повреждаются и должны быть заменены или смазаны, что увеличивает затраты на техническое обслуживание.Другим преимуществом является стоимость. За счет исключения редуктора привод с прямым приводом на самом деле представляет собой просто двигатель, а не комбинацию двигатель/редуктор. Это дает немедленную экономию средств. Поскольку стоимость срабатывания снижается, это приближает робототехнику к точке перегиба. Это ускорит внедрение роботов не только для промышленного использования, но и для потребительского и непроизводственного использования, например, в здравоохранении.
В приводах используются новые свойства, позволяющие роботам работать без шестерен. Характеристики, которые следует искать в прямом приводе:
- Усиленные магниты: Ищите уникальные конфигурации, которые увеличивают эффективную силу стандартных постоянных магнитов.
- Структурно-магнитная синергия: Огромные магнитные силы, создаваемые усиленным магнитным полем, разрушили бы обычную конструкцию двигателя. Этот новый уровень магнитных характеристик требует механической конструкции, достаточно прочной, чтобы противостоять возникающим силам, но достаточно легкой, чтобы обеспечить самое высокое отношение крутящего момента к весу 9.0004
- Термодинамическая аномалия: Тепло является ограничивающим фактором в любом электромагнитном устройстве. Сочетание первых двух основополагающих открытий обеспечивает тонкую и легкую структуру, которая позволяет рассеивать тепло. Благодаря эффективному рассеиванию тепла ваш привод работает на гораздо более высоких уровнях мощности, чем обычный двигатель.
У компании Genesis Robotics есть пример этой безредукторной конструкции с прямым приводом под названием «LiveDrive», в которой реализованы эти три основополагающих открытия (рис. 2).
Итак, в чем разница между редуктором и прямым приводом?
Как отмечалось выше, основные различия между этими двумя системами заключаются в их стоимости и производительности в роботах.
Приводы с прямым приводом, такие как LiveDrive, полностью устраняют необходимость в зубчатой передаче, что приводит к меньшему общему весу и меньшему количеству движущихся частей. Это компоненты, которые можно производить с низкой себестоимостью — более чем на 50 % дешевле, чем традиционный привод с редуктором.Исключение зубчатой передачи также устраняет люфт, который существенно влияет на точность. Решения с прямым приводом могут обеспечить высочайший уровень точности, прецизионности и жесткости на кручение на рынке. Еще одним важным усовершенствованием является возможность обратного привода привода. Они также могут обеспечивать эту производительность на гораздо более высоких скоростях, поскольку из системы также удаляются характеристики снижения скорости коробки передач.
Технология привода остается неизменной уже более 50 лет. Недостаточная точность движений и громоздкий дизайн сдерживают их потенциал. Отсутствие реинжиниринга системы привода, помимо снижения стоимости и сложности приведения в действие, замедлило распространение роботов на потребительских рынках.
- W.
 . В большинстве промышленных роботов обычно встречаются две относительно нетрадиционные технологии передачи — Harmonic Drives© и Cycloid Drives, которые не так широко используются в других отраслях. Понимание происхождения этой сингулярности дает ценную информацию для поиска подходящих будущих технологий роботизированной трансмиссии. В…
. В большинстве промышленных роботов обычно встречаются две относительно нетрадиционные технологии передачи — Harmonic Drives© и Cycloid Drives, которые не так широко используются в других отраслях. Понимание происхождения этой сингулярности дает ценную информацию для поиска подходящих будущих технологий роботизированной трансмиссии. В…  , т. е. увеличить его эффективность, уменьшить его инерцию, увеличить его крутящий момент и т. д.
, т. е. увеличить его эффективность, уменьшить его инерцию, увеличить его крутящий момент и т. д. Roozing, G. Roozing
Roozing, G. Roozing Производительность роботов на ногах также, вероятно, выиграет от…
Производительность роботов на ногах также, вероятно, выиграет от…
 в приводе HRI и раскрывает потенциал практически неиспользованного вида планетарных зубчатых передач.
в приводе HRI и раскрывает потенциал практически неиспользованного вида планетарных зубчатых передач. описан.
описан.
 Тем не менее, актуаторы, похоже, упускают из виду, когда речь заходит об их потребности в инновациях.
Тем не менее, актуаторы, похоже, упускают из виду, когда речь заходит об их потребности в инновациях. е. чем выше передаточное число или больше ступеней), что обычно требуется для приложений с более высоким крутящим моментом, тем больше люфт в системе трансмиссии. Люфт повлияет на точность робота, а в крайних случаях может даже повлиять на безопасность.
е. чем выше передаточное число или больше ступеней), что обычно требуется для приложений с более высоким крутящим моментом, тем больше люфт в системе трансмиссии. Люфт повлияет на точность робота, а в крайних случаях может даже повлиять на безопасность. Кроме того, жесткие допуски приводят к высокому трению, или необходим механизм, обеспечивающий плотное зацепление шестерен во всем диапазоне крутящего момента.
Кроме того, жесткие допуски приводят к высокому трению, или необходим механизм, обеспечивающий плотное зацепление шестерен во всем диапазоне крутящего момента.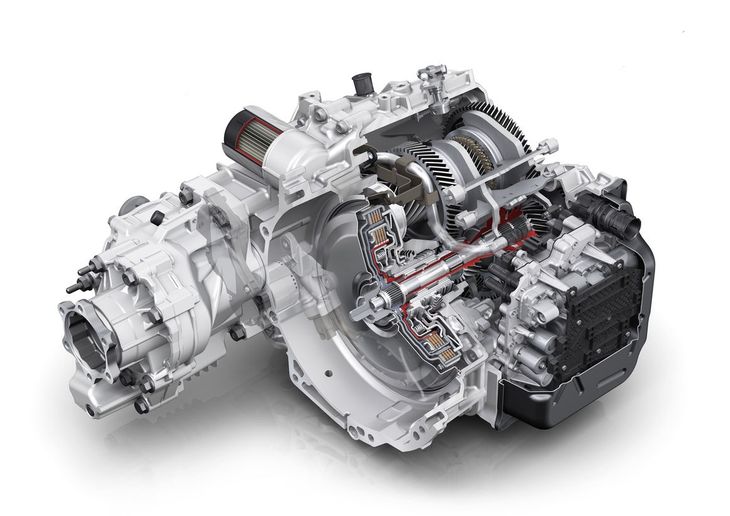 Проблема шума привела к созданию винтовой шестерни, которая позволяет зубьям входить в зацепление более плавно. Когда мы меняем передаточное число для увеличения крутящего момента, это происходит за счет снижения скорости. Это связано с тем, что двигатель, приводящий в движение коробку передач, снижает выходную скорость для увеличения крутящего момента. Вот почему редукторы также часто называют редукторами.
Проблема шума привела к созданию винтовой шестерни, которая позволяет зубьям входить в зацепление более плавно. Когда мы меняем передаточное число для увеличения крутящего момента, это происходит за счет снижения скорости. Это связано с тем, что двигатель, приводящий в движение коробку передач, снижает выходную скорость для увеличения крутящего момента. Вот почему редукторы также часто называют редукторами. Кроме того, высокая ударопрочность делает их очень подходящими для экзоскелетов и шагающих роботов, где удары при ходьбе могут повредить шестерни.
Кроме того, высокая ударопрочность делает их очень подходящими для экзоскелетов и шагающих роботов, где удары при ходьбе могут повредить шестерни. Люфт в редукторных системах часто требует сложного программирования, чтобы повысить точность и компенсировать «люфт» в шестернях. Это требует времени и часто нуждается в постоянной повторной калибровке. Шестерни также повреждаются и должны быть заменены или смазаны, что увеличивает затраты на техническое обслуживание.
Люфт в редукторных системах часто требует сложного программирования, чтобы повысить точность и компенсировать «люфт» в шестернях. Это требует времени и часто нуждается в постоянной повторной калибровке. Шестерни также повреждаются и должны быть заменены или смазаны, что увеличивает затраты на техническое обслуживание.
 Приводы с прямым приводом, такие как LiveDrive, полностью устраняют необходимость в зубчатой передаче, что приводит к меньшему общему весу и меньшему количеству движущихся частей. Это компоненты, которые можно производить с низкой себестоимостью — более чем на 50 % дешевле, чем традиционный привод с редуктором.
Приводы с прямым приводом, такие как LiveDrive, полностью устраняют необходимость в зубчатой передаче, что приводит к меньшему общему весу и меньшему количеству движущихся частей. Это компоненты, которые можно производить с низкой себестоимостью — более чем на 50 % дешевле, чем традиционный привод с редуктором.