Содержание
FAQ по электродвигателям | Техпривод
Какие электродвигатели применяются чаще всего?
Какие способы управления электродвигателями используются?
Как прозвонить электродвигатель и определить его сопротивление?
Как определить мощность электродвигателя?
Как увеличить или уменьшить обороты электродвигателя?
Как рассчитать ток и мощность электродвигателя?
Как увеличить мощность электродвигателя?
Каковы потери мощности при подключении трехфазного двигателя к однофазной сети?
Какие исполнения двигателей бывают?
Зачем электродвигателю тормоз?
Как двигатель обозначается на электрических схемах?
Почему греется электродвигатель?
Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле. Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера. Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению. Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение. Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев. Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам.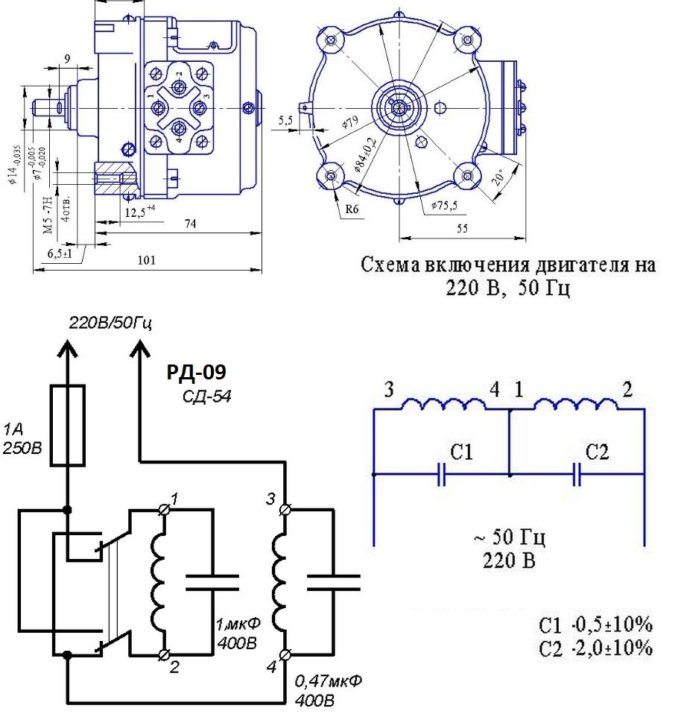 При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
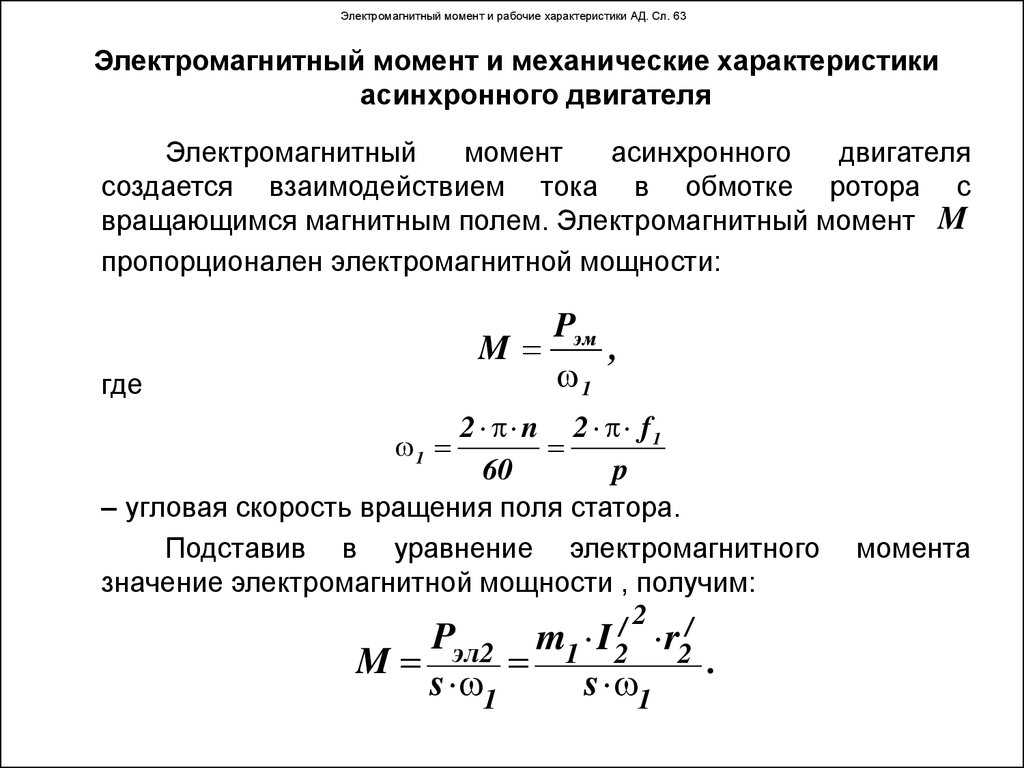
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
Р = I (1,73·U·cosφ·η)
где:
Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике),
I – ток двигателя, А,
U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
Для расчета тока по известной мощности пользуются обратной формулой:
I = P/(1,73·U·cosφ·η)
Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В).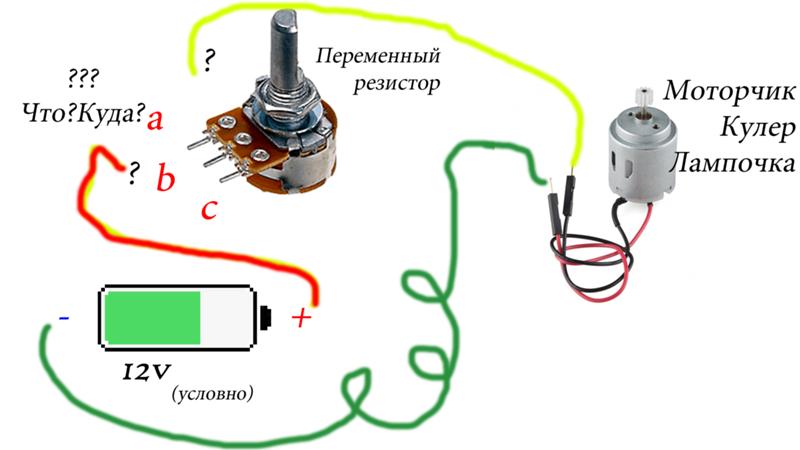 Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность.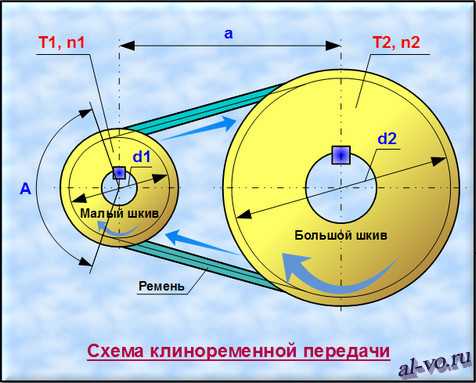 Примеры обозначений показаны ниже.
Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
13. Типичные неисправности электродвигателей
Выделяют два вида неисправностей электродвигателей: электрические и механические.
К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы:
Выбор электродвигателя
Использование тормозных резисторов с преобразователями частоты
Как повысить обороты электродвигателя
Причем не только у простого люда, но и на государственном уровне. Для этого достаточно взглянуть на квитанцию об уплате транспортного налога. А все потому, что она определяет относительный уровень производительности среднестатистической лошади путем определения усилий, необходимых для подъема килограммового груза на один метр за одну секунду. Новая единица измерения, взятая на вооружение фабрикантами для оценки превосходства стационарных механизмов над животными, со временем перекочевала в мир подвижного состава. Ватт, синхронизированный с л. О нем, впрочем, как и о мощности, бытует расхожее мнение: чем больше, тем лучше.
Новая единица измерения, взятая на вооружение фабрикантами для оценки превосходства стационарных механизмов над животными, со временем перекочевала в мир подвижного состава. Ватт, синхронизированный с л. О нем, впрочем, как и о мощности, бытует расхожее мнение: чем больше, тем лучше.
Поиск данных по Вашему запросу:
Как повысить обороты электродвигателя
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- Регулировка оборотов электродвигателя 220В и 12В
- Способы регулирования скорости асинхронного двигателя
- Что важнее: крутящий момент или мощность двигателя?
- Способы увеличения мощности электродвигателя.
Как увеличить обороты асинхронного двигателя
- Двигатель 3000 оборотов в минуту
- Сколько оборотов делает двигатель стиральной машины
- Как увеличить мощность электродвигателя 220 вольт
- Управление скоростью вращения однофазных двигателей
- Как повысить эффективность электродвигателя
 Как увеличить обороты асинхронного двигателя
Как увеличить обороты асинхронного двигателяПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Регулятор оборотов электродвигателя 220В
Регулировка оборотов электродвигателя 220В и 12В
Некоторые ситуации требуют изменения оборотов двигателя от номинальных. Иногда требуется уменьшить обороты электродвигателя, потому что их увеличение негативно сказывается на подшипниковом аппарате. Способы изменения вращения зависят от модели электрической машины. Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
Иногда требуется уменьшить обороты электродвигателя, потому что их увеличение негативно сказывается на подшипниковом аппарате. Способы изменения вращения зависят от модели электрической машины. Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой.
В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат. Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность — введение реостата в обмотку возбуждения.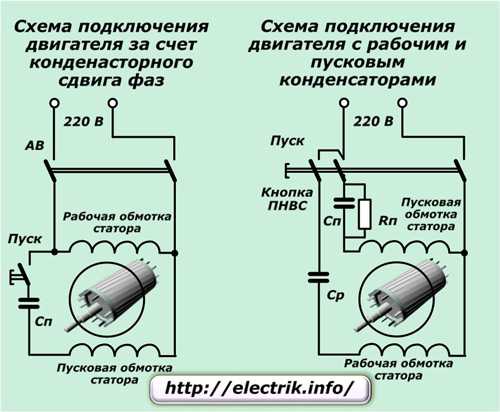 Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов.
Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов.
Это происходит ввиду насыщения обмотки. Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять. Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Таким образом можно менять параметры на двигателе в. Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип. Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним.
Таким образом можно менять параметры на двигателе в. Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип. Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним.
Питание может быть 12, 24, 36в, или другое. Что нужно — это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12—0в не получится, другие варианты дают такую возможность. Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату — это уже зависит от желания и возможностей каждого человека. Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.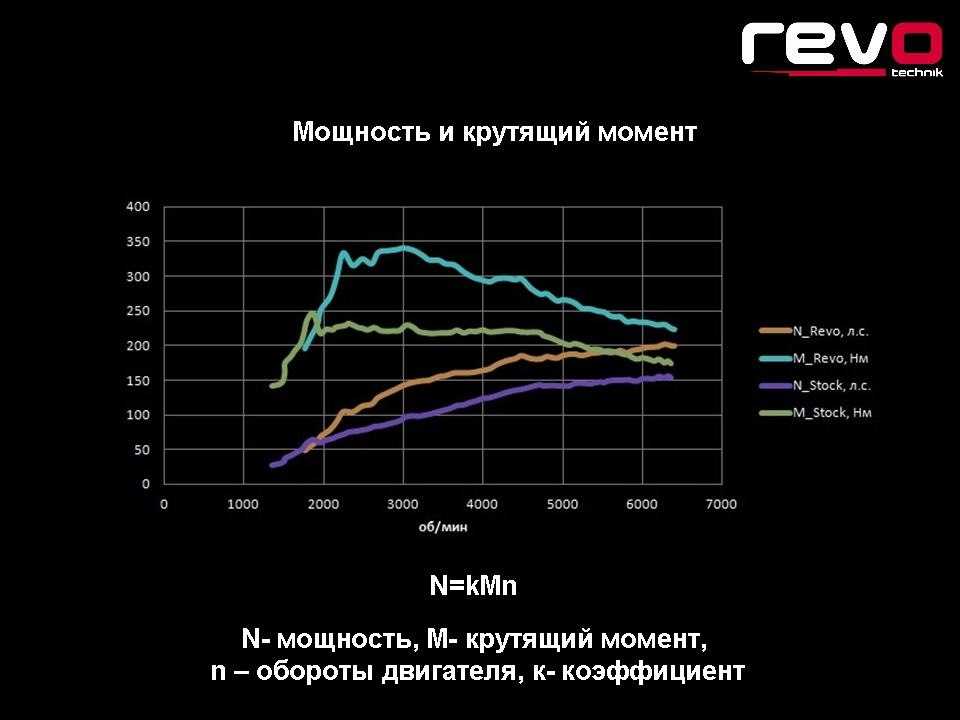 Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12—0в.
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12—0в.
Как результат — можно убратькрутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12—18в. Двигатель постоянного тока, питание — переменное, так как стоит диодный мост.
При желании можно мост выбросить и запитывать постоянкой от своего блока питания. Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения. Конструкция подключается непосредственно к сети. Регулировочный элемент — симистор, управление которого осуществляется динистором.
Симистор ставится на теплоотвод, максимальная мощность нагрузки — Вт.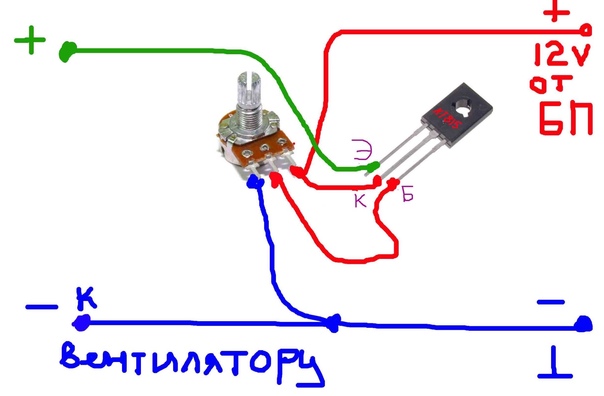 Аппарат, имеющий две обмотки — пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Аппарат, имеющий две обмотки — пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством.
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого. Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь — самое лучшее решение для таких двигателей.
Понятно, что число оборотов нужно как-то определять.![]() Для этого используют тахометры. Они показывают число вращения на данный момент. Обычным мультиметром просто так измерить скорость не получится, разве что на автомобиле. Как видно, на электрических машинах можно менять различные параметры, подстраивая их под нужды производства и домашнего хозяйства. В жизни бывают ситуации, когда нужно запустить 3-х фазный асинхронный электродвигатель от бытовой сети.
Для этого используют тахометры. Они показывают число вращения на данный момент. Обычным мультиметром просто так измерить скорость не получится, разве что на автомобиле. Как видно, на электрических машинах можно менять различные параметры, подстраивая их под нужды производства и домашнего хозяйства. В жизни бывают ситуации, когда нужно запустить 3-х фазный асинхронный электродвигатель от бытовой сети.
Статор имеет специальные пазы углубления , в которые и укладывается обмотка, распределенная таким образом, чтобы угловое расстояние составляло градусов. Обмотки устройства создают одно или несколько пар полюсов, от числа которых зависит частота, с которой может вращаться ротор, а также другие параметры электродвигателя — КПД, мощность и другие параметры. При включении асинхронного мотора в сеть с тремя фазами, по обмоткам в различные временные промежутки протекает ток.
Если подключить АД в сеть с одной фазой без выполнения подготовительных работ , ток появится только в одной обмотке.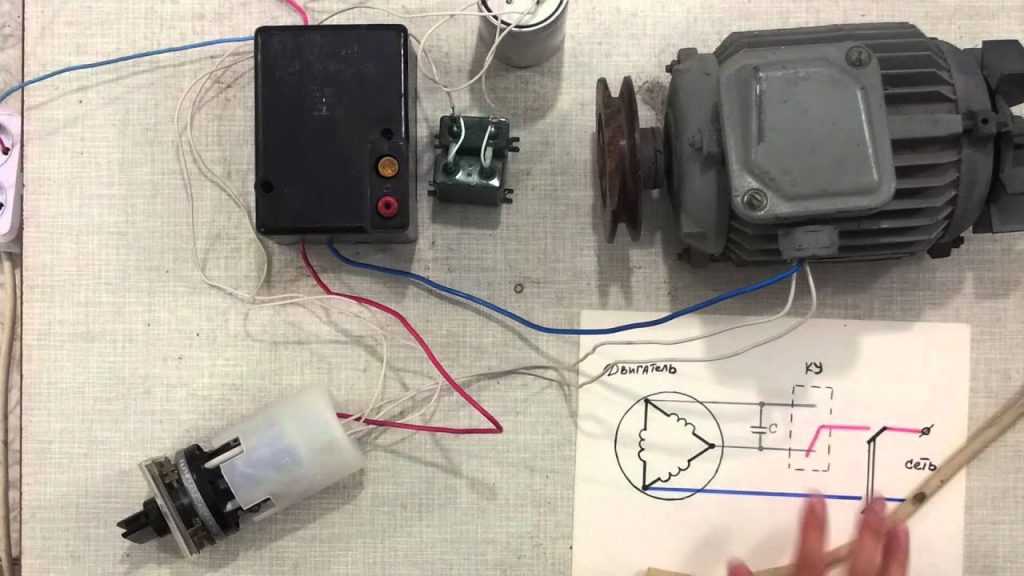 Вот почему в большинстве случаев требуется применение пусковых и рабочих конденсаторов, обеспечивающих работу трехфазного мотора. Но существуют и другие варианты. Как отмечалось выше, для пуска ЭД с короткозамкнутым ротором от сети с одной фазой чаще всего применяется конденсатор. Именно он обеспечивает пуск устройства в первый момент времени после подачи однофазного тока.
Вот почему в большинстве случаев требуется применение пусковых и рабочих конденсаторов, обеспечивающих работу трехфазного мотора. Но существуют и другие варианты. Как отмечалось выше, для пуска ЭД с короткозамкнутым ротором от сети с одной фазой чаще всего применяется конденсатор. Именно он обеспечивает пуск устройства в первый момент времени после подачи однофазного тока.
При этом емкость пускового устройства должна в три раза превышать этот же параметр для рабочей емкости. Для АД, имеющих мощность до 3-х киловатт и применяемых в домашних условиях, цена на пусковые конденсаторы высока и порой соизмерима со стоимостью самого мотора. По-другому обстоит ситуация с рабочими конденсаторами, использование которых позволяет загрузить мотор на процентов его мощности. В случае их отсутствия показатель мощности может упасть до 50 процентов.
Тем не менее, бесконденсаторный пуск 3-х фазного мотора от однофазной сети возможен, благодаря применению двунаправленных ключей, срабатывающих на короткие промежутки времени.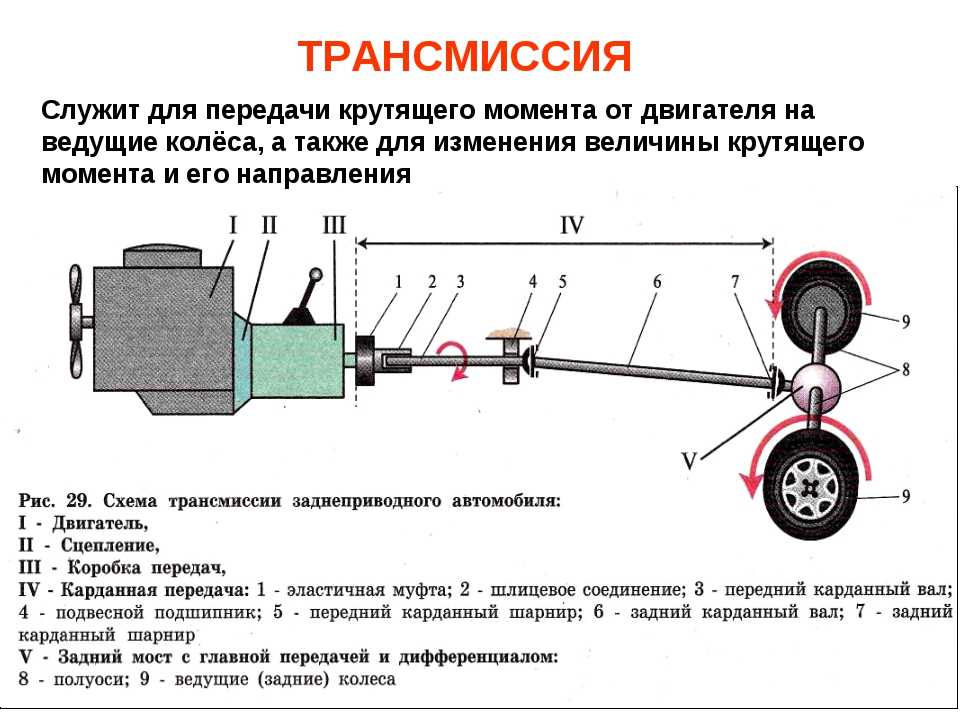 Основные элементы схемы — симисторы и симметричный динистры. Первые управляются разнополярными импульсами, а второй — сигналами, поступающими от полупериода питающего напряжения.
Основные элементы схемы — симисторы и симметричный динистры. Первые управляются разнополярными импульсами, а второй — сигналами, поступающими от полупериода питающего напряжения.
В роли фазосдвигающего устройства выступает RC-цепь. Меняя сопротивление R2, удается добиться на емкости напряжения, смещенного на определенный угол относительно напряжения бытовой сети.
Выполнение главной задачи берет на себя симметричный динистор VS2, который в определенный момент времени подключает заряженную емкость к симистору и активирует этот ключ. Для таких моторов требуется больший пусковой ток, поэтому более актуальной является схема разомкнутой звезды. Особенность — применение двух электронных ключей, замещающих фазосдвигающие конденсаторы. В процессе наладки важно обеспечить требуемый угол сдвига в фазных обмотках.
Для начала определитесь, какая схема собрана на ЭД. Для этого откройте крышку-барно, куда выводятся клеммы АД, и посмотрите, сколько проводов выходит из устройства чаще всего их шесть. Обозначения имеют следующий вид: С1-С3 — начала обмотки, а С4-С6 — ее концы. Сложнее всего обстоят дела, если с корпуса просто выходит шесть проводов.
Обозначения имеют следующий вид: С1-С3 — начала обмотки, а С4-С6 — ее концы. Сложнее всего обстоят дела, если с корпуса просто выходит шесть проводов.
В таком случае нужно искать на них соответствующие обозначения С1-С6. Чтобы реализовать схему подключения трехфазного ЭД к однофазной сети, требуются конденсаторы двух видов — пусковые и рабочие. Первые применяются для пуска электродвигателя в первый момент. Как только ротор раскручивается до нужного числа оборотов, пусковая емкость исключатся из схемы. Расчет емкости должен производиться с учетом номинальной мощности ЭД.
Если мотор будет недогружен, неизбежен перегрев, и тогда емкость рабочего конденсатора придется уменьшать.
Способы регулирования скорости асинхронного двигателя
Если спросить автовладельца, что такое холостые обороты мотора, он наверняка ответит, что это режим, в котором мотор работает без нагрузки, и будет полностью прав. Многие даже смогут точно назвать правильную величину оборотов для их автомобилей.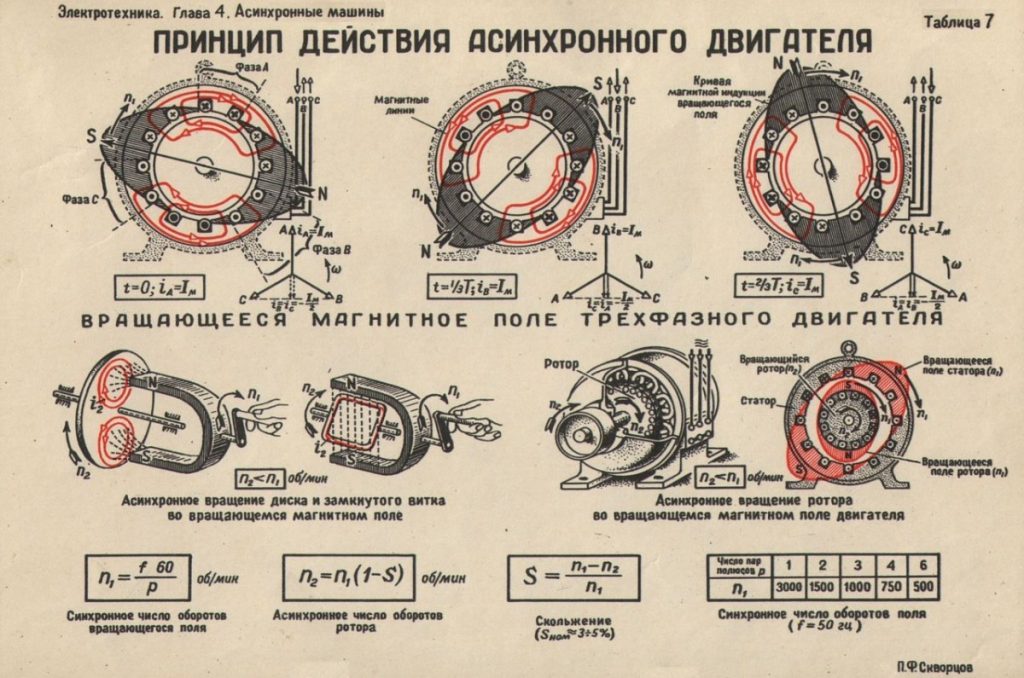 Но почему эти обороты именно такие? Почему не больше, не меньше, почему они изменяются, как и для чего поддерживаются?
Но почему эти обороты именно такие? Почему не больше, не меньше, почему они изменяются, как и для чего поддерживаются?
Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Что важнее: крутящий момент или мощность двигателя?
Регистрация Вход. Ответы Mail. Вопросы — лидеры Задача по физике 1 ставка. Провод КСПВ, вопрос к электрикам 1 ставка. Мощность рассеивания транзистора? Зачем электродрели нужен редуктор, точнее большая шестеренка? Лидеры категории Антон Владимирович Искусственный Интеллект. Кислый Высший разум. Подскажите простой способ увеличения оборотов электродвигателя.
Способы увеличения мощности электродвигателя. Как увеличить обороты асинхронного двигателя
Регулировка оборотов электродвигателя, в сторону увеличения, возможна, в пределах расчетной мощности двигателя. Также, имеет значение область применения и условия эксплуатации агрегата. Все существующие способы сводятся к модификации параметров питания или изменении нагрузки на вал двигателя. Правило, справедливое для всех типов двигателей — увеличение числа оборотов должно осуществляться исключительно в рамках допустимых, для данной модели, значений. Повышение числа оборотов данного типа двигателя, достигается путем увеличения напряжения питания или уменьшения нагрузки на вал.
Правило, справедливое для всех типов двигателей — увеличение числа оборотов должно осуществляться исключительно в рамках допустимых, для данной модели, значений. Повышение числа оборотов данного типа двигателя, достигается путем увеличения напряжения питания или уменьшения нагрузки на вал.
Плавная работа двигателя, без рывков и скачков мощности — это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Двигатель 3000 оборотов в минуту
Начнем с того, что многие водители часто сталкиваются с тем, когда расход топлива в процессе эксплуатации авто заметно отличается от тех данных, которые заявлены самим производителем. Вполне очевидно, что владельцы начинают задумываться об экономии. Как правило, самым простым выходом из ситуации становится установка ГБО. Добавим, что вокруг различных приемов и способов, которые помогают экономить топливо при езде, ходит много споров. В этом случае обороты упадут до тыс.
В этом случае обороты упадут до тыс.
Сколько оборотов делает двигатель стиральной машины
Некоторые ситуации требуют изменения оборотов двигателя от номинальных. Иногда требуется уменьшить обороты электродвигателя, потому что их увеличение негативно сказывается на подшипниковом аппарате. Способы изменения вращения зависят от модели электрической машины. Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно. Легче всего изменять обороты электродвигателя постоянного тока.
В каких пределах можно менять обороты электродвигателя при переходе на частотный привод? Двигатель трехфазный 50Гц до 1кВт.
Как увеличить мощность электродвигателя 220 вольт
Как повысить обороты электродвигателя
Наиболее распространённая конструкция таких двигателей содержит две или более обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Управление скоростью вращения однофазных двигателей
ВИДЕО ПО ТЕМЕ: Чем регулировать обороты коллекторного и асинхронного мотора стиральной машины.
Как увеличить частоту вращения асинхронного двигателя выше указанной в характеристиках? Как увеличить частоту вращения асинхронного двигателя выше указанной в характеристиках — что просто увеличить частоту с 50 герц до к примеру ? Если я правильно понимаю частота вращения асинхронного двигателя регулируется изменением частоты тока. Получается надо просто увеличить частоту до, к примеру, герц. Вопрос как это проще сделать и не потребует ли это каких-либо других переделок — к примеру, замена того же конденсатора стартовой обмотки и т. Это несложно, но стОит денег порядка неск.
Некоторые ситуации требуют изменения оборотов двигателя от номинальных.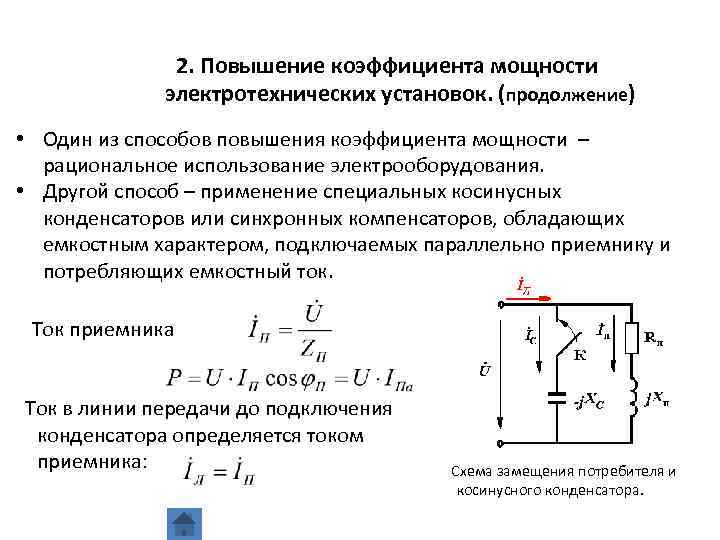 Иногда требуется уменьшить обороты электродвигателя, потому что их увеличение негативно сказывается на подшипниковом аппарате.
Иногда требуется уменьшить обороты электродвигателя, потому что их увеличение негативно сказывается на подшипниковом аппарате.
Как повысить эффективность электродвигателя
Наиболее распространённая конструкция таких двигателей содержит две или более обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные. В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность. Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток. Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:.
Забыли пароль? Изменен п. Расшифровка и пояснения — тут.
Как увеличить мощность электродвигателя?
Что с RPM
Как получилось, что у них одинаковые максимальные обороты? Разве большая мощность не должна означать более высокую скорость при отсутствии других переменных (например, веса)? На что тратится лишний ток, как не на скорость? Крутящий момент? Или дополнительный ток потребляется только под нагрузкой; в ответ на физическое сопротивление (т.е. сопротивление) карданному валу?
У них одинаковые обороты, потому что они асинхронные двигатели . (также были бы равны, если бы они были синхронные двигатели ).
То, что вы ожидаете, это последовательная обмотка или шунт поведение двигателя. Это устройства постоянного тока, которые требуют значительного обслуживания или сложности: Щетки .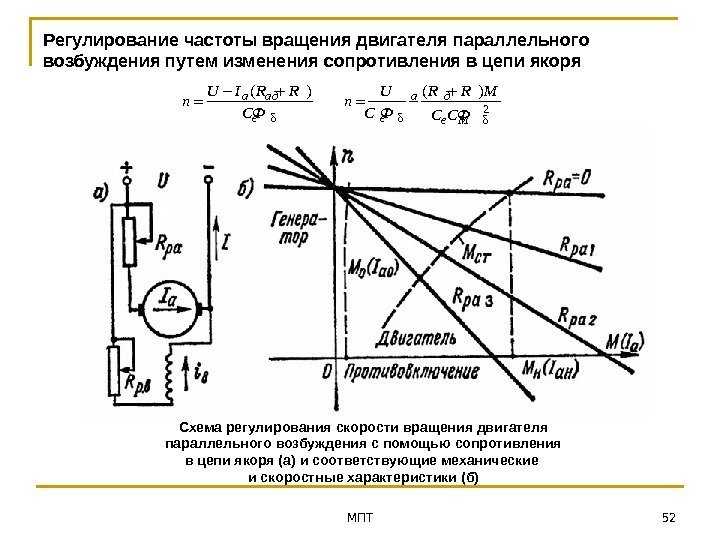 *
*
Помните, что это питание переменного тока. Он исходил от вращающегося генератора. 3 фазы уже вращаются — достигают максимума в последовательности: A-B-C-A-B-C. Двигатель — это сама простота: 3 обмотки в статоре, подсоедините их к каждой фазе, и вот у вас есть вращающееся магнитное поле в статоре. Вращается с частотой 50 Гц, согласованная частота сети переменного тока .
(вернемся к однофазной морщинке).
Таким образом, со статором, вращающимся с частотой 50 Гц (или 25 Гц, если вы намотали его с двойными полюсами), ротор очень прост. Постоянный магнит дал бы синхронный двигатель , но еще дешевле, трюк с индукцией позволяет использовать полностью пассивный алюминиевый ротор с «беличьей клеткой», обеспечивающий почти синхронную скорость.
Если вы можете работать на 2880, 1440 или 720 об/мин, это дешевле* во всех отношениях.
С однофазным двигателем это как педали велосипеда — Если вы заводите велосипед с педалью в абсолютном верхнем положении, он не упадет вниз — для его запуска требуется боковая сила , но во время движения она не нужна. Это то, что делают конденсатор и дополнительная обмотка. Опять же раз мотор крутится он не нужен.
Это то, что делают конденсатор и дополнительная обмотка. Опять же раз мотор крутится он не нужен.
В любом случае, вы правы в том, что дополнительный ток не потребляется, если к двигателю не подключена нагрузка. В этот момент двигатель заглохнет — или нет — в зависимости от того, сможет ли он справиться с нагрузкой.
Максимальный крутящий момент двигателя соответствует заявленной частоте (например, 1440 об/мин). Ниже этого момента крутящий момент становится все хуже и хуже. Если вы когда-либо расширяли возможности настольной пилы, вы хорошо знакомы с тем, как легко заглохнуть или заглохнуть двигатель, требуя от него слишком многого. Нагрузка (машина) должна быть спроектирована таким образом, чтобы соответствовать этой кривой крутящего момента. Вот почему в трамваях и электропоездах не используются асинхронные двигатели (по крайней мере, без частотно-регулируемого привода).
Когда вам нужен двигатель, который переключается на пониженную передачу и создает все больший и больший крутящий момент, вам нужен двигатель постоянного тока с последовательной обмоткой, который используется в поездах. Или частотно-регулируемый привод, настроенный на тот же эффект.
Или частотно-регулируемый привод, настроенный на тот же эффект.
Размер
Для двигателя вдвое большей мощности требуется вдвое больше массы медных обмоток.
Все очень просто. Они создают вдвое больший магнитный поток, по крайней мере, так они говорят**. Будь то более длинная или толстая проволока, не имеет большого значения. (более длинный провод, скорее всего, означает, что они параллельны).
Без вала (вычислите L — E) двигатели имеют диаметр 156 x длину 255 по сравнению с диаметром 174 x длину 295. Таким образом, размер одного двигателя составляет 6 205 680 цилиндрических мм, а другого — 8 931 420 цилиндрических мм. Это значительно меньше, чем удвоенный размер пакета, но с учетом того, что не нужно расширять, например, толщину корпуса или диаметр ротора, это может быть правильно.
* Если вы действительно, действительно, действительно не хотите сделать привод с переменной частотой, используя кремний для преобразования переменного тока в постоянный, а затем обратно в переменный на любой частоте, которую вы хотите.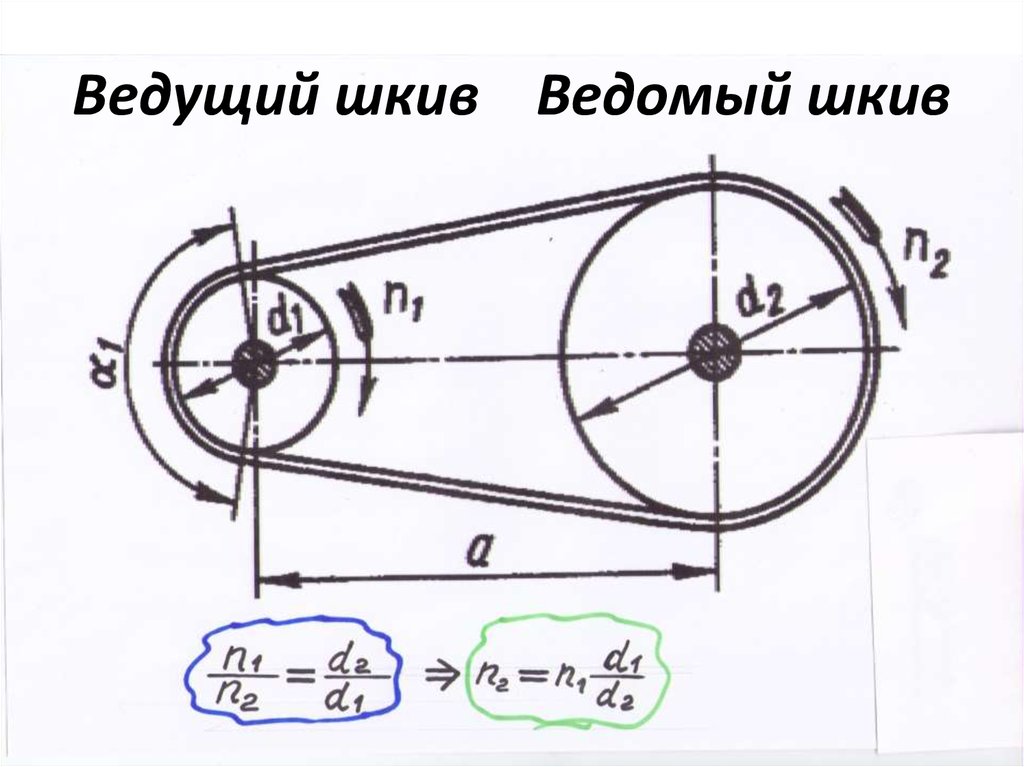
** А эти моторы дешевые китайцы. Обратите внимание на очевидную орфографическую ошибку в нижнем ярлыке и «странный шрифт» в верхнем. Это шрифт для китайского языка в стиле, подходящем для китайских иероглифов, который включает в себя 52 латинские буквы, выполненные в соответствующем стиле. Также заметная маркировка CE, которую они подделывают, потому что за это нет никаких последствий, если только ваши ботинки не находятся в ЕС.
*** В Северной Америке 60 Гц, 3450 об/мин, 1725 об/мин или 885 об/мин.
Как улучшить крутящий момент и число оборотов двигателя постоянного тока?
Я предполагаю, что этот 6-летний ребенок имеет хотя бы небольшое представление о физике. Я собираюсь начать с ответа, почему каждый результат будет происходить с большим количеством математики, чтобы описать физику, стоящую за всем этим. Затем я отвечу на каждый случай индивидуально с математикой, объясняющей каждый результат. В завершение я отвечу на ваш «общий» вопрос.
Ответ на все ваши «Почему?» вопросы есть: Физика! В частности, закон Лоренца и закон Фарадея.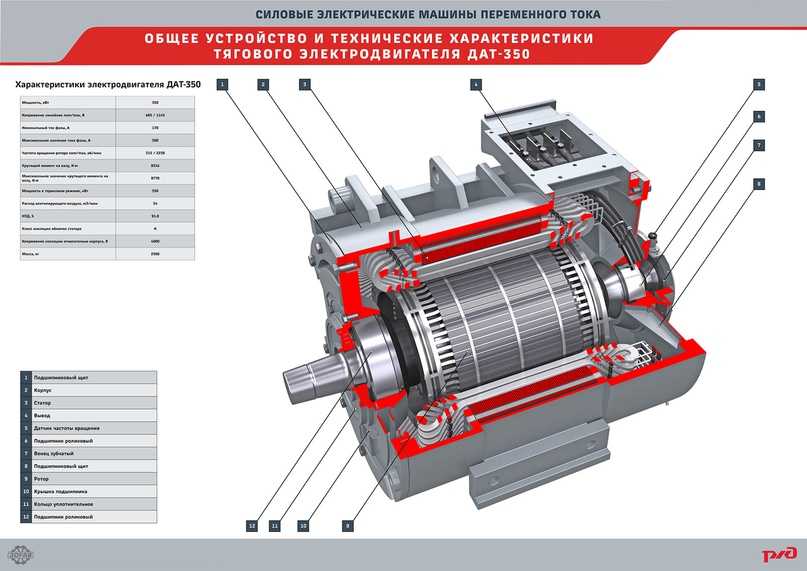 Отсюда:
Отсюда:
Крутящий момент двигателя определяется уравнением:
$$\tau = K_t \cdot I~~~~~~~~~~(N \cdot m)$$
Где:
\$\tau = \text{крутящий момент}\$
\$K_t = \text{константа крутящего момента}\$
\$I = \text{ток двигателя}\$
Константа крутящего момента, \$ K_t\$ — это один из основных параметров двигателя, который описывает конкретный двигатель на основе различных параметров его конструкции, таких как магнитная сила, количество витков провода, длина якоря и т. д., как вы упомянули. Его значение дается в крутящем моменте на ампер и рассчитывается как:
$$K_t = 2 \cdot B \cdot N \cdot l \cdot r~~~~~~~~~~(N \cdot m / A)$$
Где:
\$B = \ text{напряженность магнитного поля в Теслах}\$
\$N = \text{количество витков провода в магнитном поле}\$
\$l = \text{длина магнитного поля, действующего на провод}\$
\$r = \text{радиус якоря}\$
Напряжение противо-ЭДС определяется:
$$V = K_e \cdot \omega~~~~~~~~~~(вольт) $$
Где:
\$V = \text{Напряжение противо-ЭДС}\$
\$K_e = \text{постоянная напряжения}\$
\$\omega = \text{угловая скорость}\$
Угловая скорость — это скорость двигателя в радианах в секунду (рад/сек), которую можно преобразовать от RPM:
$$\text{rad/sec} = \text{RPM}\times\dfrac{\pi}{30}$$
\$K_e\$ — второй основной параметр двигателя. Как ни странно, \$K_e\$ вычисляется по той же формуле, что и \$K_t\$, но в других единицах измерения:
Как ни странно, \$K_e\$ вычисляется по той же формуле, что и \$K_t\$, но в других единицах измерения:
$$K_e = 2 \cdot B \cdot N \cdot l \cdot r~~~~ ~~~~~~(вольт/рад/сек)$$
Почему \$K_e = K_t\$? Из-за физического закона сохранения энергии. Что в основном гласит, что электрическая мощность, подаваемая на двигатель, должна равняться механической мощности, получаемой от двигателя. Предполагая эффективность 100%:
\$P_{in} = P_{out}\$
\$V \cdot I = \tau \cdot \omega\$
Подставляя уравнения выше, получаем:
\$ (K_e \cdot \omega) \cdot I = (K_t \cdot I) \cdot \omega\$
\$K_e = K_t\$
Я предполагаю, что каждый параметр изменяется изолированно.
Случай 1: Напряженность магнитного поля прямо пропорциональна постоянной крутящего момента, \$K_t\$. Таким образом, при увеличении или уменьшении напряженности магнитного поля крутящий момент \$\tau\$ будет увеличиваться или уменьшаться пропорционально. Что имеет смысл, потому что чем сильнее магнитное поле, тем сильнее «толчок» на якорь.
Что имеет смысл, потому что чем сильнее магнитное поле, тем сильнее «толчок» на якорь.
Сила магнитного поля также прямо пропорциональна постоянной напряжения, \$K_e\$. Однако \$K_e\$ обратно пропорциональна угловой скорости:
$$\omega = \dfrac{V}{K_e}$$
Итак, по мере увеличения магнитного поля скорость будет уменьшаться. Это снова имеет смысл, потому что чем сильнее магнитное поле, тем сильнее «толчок» на якорь, чтобы он сопротивлялся изменению скорости.
Поскольку выходная мощность равна крутящему моменту, умноженному на угловую скорость, а входная мощность равна выходной мощности (опять же, при условии 100% эффективности), мы получаем:
$$P_{in} = \tau \cdot \omega$$
Таким образом, любое изменение крутящего момента или скорости будет прямо пропорционально мощности, необходимой для привода двигателя.
Случай 2: (Здесь еще немного математики, которую я явно не упоминал выше) Возвращаясь к закону Лоренца, мы видим, что:
$$\tau = 2 \cdot F \cdot r = 2 ( I \cdot B \cdot N \cdot l) r$$
Следовательно:
$$F = I \cdot B \cdot N \cdot l$$
Благодаря Ньютону имеем:
$$F = m \cdot g$$
Итак. ..
..
$$\tau = 2 \cdot m \cdot g \cdot r$$
повысится. Как видно выше, масса прямо пропорциональна крутящему моменту, как и напряженность магнитного поля, поэтому применим тот же результат.
Случай 3: Радиус якоря, \$r\$ в приведенных выше уравнениях, снова прямо пропорционален константам нашего двигателя. Итак, еще раз, мы получаем те же результаты, что и при увеличении и уменьшении его длины.
Начинаете замечать здесь закономерность?
Случай 4: Количество витков нашего провода, \$N\$ в наших уравнениях выше, также прямо пропорционально нашим постоянным двигателям. Итак, как обычно, мы получаем одинаковые результаты при увеличении и уменьшении количества витков.
Если это еще не очевидно, крутящий момент и скорость обратно пропорциональны:
Необходимо найти компромисс между входной мощностью двигателя (напряжение и ток) и выходной мощностью двигатель (крутящий момент и скорость):
$$V \cdot I = \tau \cdot \omega$$
Если вы хотите сохранить постоянное напряжение, вы можете только увеличить ток.