Содержание
Электронная система блокировки дифференциала XDS и EDS
XDS и EDS – система электронной блокировки межколесного дифференциала
XDS – система электронной блокировки межколесного дифференциала, устанавливаемая на автомобили Volkswagen. Система XDS действует по принципу поперечной блокировки с помощью притормаживания. Эта система позволяет существенно увеличить тягу и управляемость автомобиля. Электронная блокировка дифференциала (XDS) является расширением системы EDS (точнее, доп.программным модулем), которая входит в состав системы курсовой устойчивости ESP. В тот момент, когда электроника XDS фиксирует значительную разгрузку одного из ведущих колес передней оси, двигающегося по внутренней дуге поворота, система ESP (точнее ее гидравлика) начинает подтормаживать данное колесо для возвращения автомобилю оптимальной тяги. Система XDS позволяет избавиться от недостаточной поворачиваемости автомобиля при скоростном прохождении поворотов, которая типична для переднеприводных машин. Управляемость автомобиля с системой XDS становиться более точной, а автомобиль напоминает скорее полноприводный, чем переднеприводный.
Управляемость автомобиля с системой XDS становиться более точной, а автомобиль напоминает скорее полноприводный, чем переднеприводный.
Плюсы системы электронной блокировки межколесного дифференциала (XDS):
- Система значительно улучшает динамику автомобиля при прохождении поворотов;
- Улучшается тяга автомобиля:
- На выходе из поворота, система XDS может позволит автомобилю идти с более высокой скоростью;
- Повышается четкость управления;
- Уменьшается угол поворота руля и повышается точность в рулевом управлении;
- Уменьшается «недостаточная» поворачиваемость;
Электронная блокировка дифференциала (EDS, Elektronische Differenzialsperre) предназначена для предотвращения пробуксовки ведущих колес при трогании автомобиля с места, разгоне на скользкой дороге, движении по прямой и в поворотах за счет подтормаживания ведущих колес. Система получила свое название по аналогии с соответствующей функцией дифференциала.
Система EDS срабатывает при проскальзывании одного из ведущих колёс. Она подтормаживает скользящее колесо, за счет чего на нем увеличивается крутящий момент. Так как ведущие колеса соединены симметричным дифференциалом, на другом колесе (с лучшим сцеплением) крутящий момент также увеличивается.
Система работает в диапазоне скоростей от 0 до 80 км/ч.
Система EDS построена на основе антиблокировочной системы тормозов. В отличие от системы ABS в конструкции электронной блокировки дифференциала предусмотрена возможность самостоятельного создания давления в тормозной системе. Для реализации данной функции используется насос обратной подачи и два электромагнитных клапана (на каждое из ведущих колес), включенные в гидравлический блок ABS. Это переключающий клапан и клапан высокого давления.
Управление системой осуществляется с помощью соответствующего программного обеспечения в блоке управления ABS. Электронная блокировка дифференциала, как правило, является составной частью антипробуксовочной системы.
Принцип работы электронной блокировки дифференциала
Работа электронной блокировки дифференциала носит цикличный характер. Цикл работы системы включает три фазы:
- увеличение давления;
- удержание давления;
- сброс давления.
Пробуксовка ведущего колёса определяется на основании сравнения сигналов, поступающих от датчиков частоты вращения колес. При этом блок управления закрывает переключающий клапан и открывает клапан высокого давления. Для создания давления в контуре тормозного цилиндра ведущего колеса включается насос обратной подачи. Происходит увеличение давления тормозной жидкости в контуре и торможение ведущего колеса.
При достижении тормозного усилия необходимой для предотвращения пробуксовки величины производится удержание давления. Это достигается отключением насоса обратной подачи.
По окончании пробуксовки производится сброс давления. При этом впускной и переключающий клапаны в контуре тормозного цилиндра ведущего колеса открыты.
При необходимости цикл работы системы EDS повторяется. Аналогичный принцип действия имеет система ETS (Electronic Traction System) от Mercedes.
Принцип работы
Датчики системы ABS, расположенные на ступицах колес, собирают информацию о скорости вращения колес и передают в электронный блок управления. Как только какое-то колесо начнет проскальзывать, электронный блок дает команду на электромагнитные клапаны, которые начинают воздействовать на тормозные колодки и притормаживать колесо. Вращающий момент на колесе увеличивается, оно перестает проскальзывать, в конце концов цепляется за дорожное покрытие. В этот момент мозг устройства ослабляет хватку, колесо растормаживается.
Виды
EDS
EDS (Elektronische Differenzialsperre) — первая разработка в этом направлении. В переводе означает электронная блокировка дифференциала или, как показано выше, правильнее назвать ее имитацией электронной блокировки дифференциала. Назначение системы — предотвращать проскальзывание ведущих колес при трогании с места. Простейшая система такого вида, устанавливается на многие бюджетные автомобили марок Ниссан, Рено и другие.
Простейшая система такого вида, устанавливается на многие бюджетные автомобили марок Ниссан, Рено и другие.
XDS
Является эволюционным развитием системы EDS, дополнена новым электронным блоком и программным обеспечением, которое позволяет более тонко управлять автомобилем в поворотах. Всякий раз, когда при входе в поворот система почувствует разгрузку колеса, катящегося по внутреннему радиусу, она притормаживает его, тем самым обеспечивая более точное прохождение поворота. Эту систему разработали специалисты Фольксвагена.
EDL
Система EDL (Electronic Differential Lock) — то же, что и EDS, просто это англоязычная аббревиатура, а та немецкая. Синоним, применяется в для автомобилей, произведенных не немецкими концернами.
Другие
Автопроизводителями ведутся постоянные опытно-конструкторские работы, и время от времени появляются анонсы усовершенствованных систем, но принципиально они ничем не отличаются от описанных выше.
Устройство и основные элементы
Стандартные компоненты описанных систем таковы:
- насос — качает тормозную жидкость к исполнительным устройствам;
- электромагнитные клапаны — открывают и закрывают потоки тормозной жидкости;
- электронный блок управления (БУ) — управляет всем процессом без вмешательства человека;
- датчики частоты вращения колес — информируют БУ о скоростях вращения каждого из колес.


Разновидности системы
Все разновидности устройств отличаются только конструктивным исполнением узлов и программным обеспечением. Каждый автопроизводитель держит свои разработки в тайне, все тонкости алгоритма работы могут быть засекречены: пользователь оценивает работу по конечному результату. Одним из комбинированных решений является ETS — система контроля тяги, которая, кроме описанной выше задачи, выполняет еще и задачу оптимизации разгона автомобиля на дорогах с любыми типами покрытий.
Применение
Системы электронной блокировки применяются на популярных марках: Ауди, Мерседес, BMW, Ниссан, Фольксваген, другие. EDS используется в Ниссан Патфайндер и Рено Дастер, ETS – на Мерседес ML320, XDS – на Шкода Октавия и Фольксваген Тигуан.
Плюсы и минусы электронной блокировки
Плюсы блокировки очевидны — автомобиль легче трогается, реже буксует и застревает, увереннее проходит повороты. Из-за уменьшения пробуксовки экономит горючее. Минус заключается в том же, что и плюс: у водителя возникает ощущение всемогущества полного контроля за ситуацией, но это не так: водитель не должен переоценивать электронные устройства и водить машину аккуратно.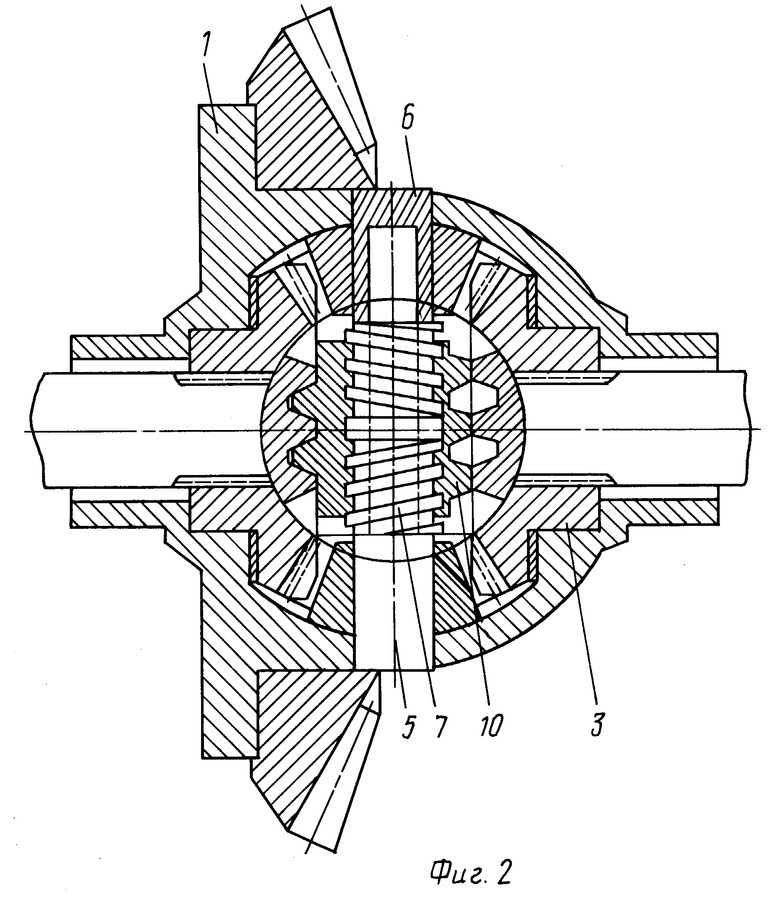
Часто задаваемые вопросы
Улучшает ли система проходимость транспортного средства?
Да, в случае гололеда или грязи под колесами вероятность застрять почти нулевая.
На какой скорости работает система?
Она эффективна при скоростях от нуля до восьмидесяти километров в час. Объявлено о некоторых моделях автомобилей представительского класса, где работает и при 100 км в час.
Для пользования нужны какие-то специальные навыки вождения?
Нет, водитель даже не почувствует работу блокировок.
Источник: https://avtoproblema24.ru/sistemy-bezopasnosti/elektronnaya-blokirovka-differentsiala/
БГАК — Учебные материалы — Д.В.Фокин — Современные автомобильные технологии — Теория — Тормозное управление
Системы управления тормозами
Электронная блокировка дифференциала (EDS)
Электронная
блокировка дифференциала создавалась как функция помощи при трогании.
Следующий
пример иллюстрирует поведение колёс ведущей оси с обычным, неблокирующимся,
дифференциалом (рис.5.2.43, а): одно из колёс ведущей оси находится на
скользком покрытии (малый коэффициент трения между дорожным покрытием и шиной),
другое колесо той же оси стоит на асфальте с высоким коэффициентом трения.
Колесо на скользкой поверхности будет вращаться с большей скоростью, поскольку
меньшая сила трения между шиной и поверхностью оказывает меньшее сопротивление
вращению колеса. В крайних случаях (при очень скользкой поверхности, например,
на льду) одно колесо будет проворачиваться, тогда как противоположное колесо
будет стоять неподвижно. Вся мощность двигателя уйдёт при этом на трение между
колесом и дорогой, а не на создание тяги. Причина такого поведения заключается
в принципе работы дифференциала, который по своей конструкции может передавать
на оба колеса только одинаковый крутящий момент.
Рисунок 5.2.43 – Поведение колес ведущей оси:
а – без EDS; б – с EDS
Если
одно из колёс прокручивается, передаваемый им крутящий момент снижается. И
И
тогда в неблагоприятных условиях (например, одно колесо на льду) крутящий
момент настолько мал, что его недостаточно для приведения в движение другого колеса.
В этом случае автомобиль остаётся стоять на месте с одним пробуксовывающим и
одним неподвижным колесом (ведущей оси).
В
таких случаях на помощь приходит так называемая электронная блокировка
дифференциала или EDS. Смысл этой функции в том, что колесо, вращающееся с
большей скоростью (т.е. имеющее большее проскальзывание), подтормаживается с
определённым тормозным моментом (рис.5.2.43, б). Этот тормозной момент (MB)
увеличивает сопротивление, испытываемое вращающимся колесом. Или, другими
словами: для вращения этого колеса будет необходим больший крутящий момент. Поскольку,
как уже было сказано, дифференциал всегда передаёт на оба колеса одинаковый
крутящий момент, одновременно увеличится и крутящий момент на противоположном
колесе. Такое увеличение крутящего момента за счёт подтормаживания колеса с
большим проскальзыванием происходит до тех пор, пока оба ведущих колеса не
будут вращаться с примерно одинаковой скоростью.
Для
реализации функции электронной блокировки дифференциала EDS требуется активное
(без участия водителя) создание тормозного давления. Чтобы для этого можно было
использовать уже имеющийся в системе ABS насос обратной подачи, к системе
добавляются четыре дополнительных клапана.
Для
реализации функции EDS насос обратной подачи должен быть в состоянии всасывать
тормозную жидкость из бачка тормозной жидкости, для чего должен быть
предусмотрен соответствующий канал. Чтобы при этом у функции ABS сохранялась
возможность уменьшения тормозного давления с обратной подачей тормозной
жидкости с преодолением давления, созданного водителем, этот канал должен при
необходимости перекрываться. Такое перекрывание реализуется двумя
дополнительными клапанами высокого давления 26 (по одному в контуре каждого из
ведущих колес) (рис.5.2.44).
Рисунок 5.2.44 – Схема гидравлического блока с клапанами EDS
Для
срабатывания электронной блокировки дифференциала (EDS) должен быть перекрыт,
напротив, канал подачи тормозной жидкости от насоса к бачку, чтобы насос
обратной подачи мог создавать давление в контуре соответствующего колеса. Для
Для
реализации этой функции устанавливаются ещё два дополнительных электромагнитных
клапана 25, по одному в контуре каждого из ведущих колёс.
Распознавание
необходимости блокировки дифференциала, расчёт параметров блокировки и
формирование управляющих команд для соответствующих электромагнитных клапанов и
насоса обратной подачи осуществляется дополнительным программным обеспечением в
блоке управления ABS. Других изменений в компонентах системы ABS для
реализацииэлектронной блокировки дифференциала (EDS) не требуется.
На
основании данных о угловых скоростях колёс функция EDS устанавливает, что одно
из колёс ведущей оси имеет более высокое проскальзывание, другими словами,
вращается быстрее, чем другое. Функция EDS должна подтормозить прокручивающееся
колесо, чтобы ведущая ось могла вновь передавать крутящий момент.
Как и
в самой системе ABS, управление давлением осуществляется по трём фазам:
«увеличение давления», «удержание давления» и «сброс давления».
1.
Увеличение давления (рис. 5.2.45)
5.2.45)
Рисунок 5.2.45 — Режим EDS «увеличение давления»
Для
увеличения (создания) давления переключающий клапан закрывается, а клапан высокого
давления открывается. Насос обратной подачи включается и начинает перекачивать
жидкость из главного тормозного цилиндра в тормозной цилиндр проворачивающегося
колеса.
Создаваемое
в нём тормозное давление приводит к подтормаживанию колеса.
2. Удержание
давления (рис.5.2.46)
Рисунок 5.2.46 — Режим EDS «удержание давления»
Для
удержания давления в контуре соответствующего колеса насос обратной подачи
отключается. Переключающий клапан остаётся закрытым.
В
контуре колеса удерживается постоянное тормозное давление.
3.
Сброс давления (рис.5.2.47)
Рисунок 5.2.47 — Режим EDS «сброс давления»
Для
сбрасывания давления на впускной и переключающий клапаны перестаёт подаваться напряжение,
т.е. они открываются.
При
активном торможении элементы тормозной системы нагреваются. Чтобы не допустить
их перегрева и, как следствие, повреждения, в программном обеспечении имеется температурная
модель тормозных механизмов. С её помощью температура тормозных дисков
С её помощью температура тормозных дисков
рассчитывается исходя из длительности торможения, скорости движения, тормозного
давления и параметров материала деталей тормозной системы. По мере достижения
предельных значений температуры функция постепенно отключается.
Электронная
блокировка дифференциала EDS действует только до определённой скорости,
зависящей от модели автомобиля.
Электронный дифференциал в электромобилях
Электронный дифференциал в электромобилях
Международный журнал научных и инженерных исследований, том 4, выпуск 11, ноябрь 2013 г. 1322
ISSN 2229-5518
Акшай аггарвал снабжается необходимым крутящим моментом. Предлагаемая структура управления основана на управлении PID
для каждого двигателя колеса. Затем система ПИД-управления оценивается в среде Matlab/Simulink. Электронный 9Дифференциал 0009 имеет то преимущество, что заменяет слабую, тяжелую и неэффективную механическую трансмиссию и механический дифференциал
более эффективными, легкими и небольшими электродвигателями, непосредственно соединенными с колесами с помощью одного редуктора или двигателя в колесе.
—————————— ——————————
Тяжелый кузов, включая структуру и материалы, используемые в электромобилях, всегда интересовал дизайнеров. Их непрерывная исследовательская работа по снижению веса тела заинтересовала многих людей во всем мире. Главной привлекательностью всегда было снижение массы кузова, включая оптимизацию структуры и формы или использование алюминиевых материалов. В автомобилях произошли улучшения как в конструкции двигателя, так и в технологии управления. Современные конфигурации
включают моторизованные колеса, в которых двигатели устанавливаются на колеса электромобилей и, таким образом, улучшают качество воздуха,
снижая зависимость транспортных средств от ископаемого топлива.
Здесь мы размышляем об использовании электронного дифференциала
(ED), заменяющего обычную коробку передач и обычную конфигурацию электромобилей
только с одним тяговым двигателем, приводящим в движение два колеса. Он снижает общую массу электромобиля за счет замены обычного механического дифференциала. Теперь вычислением опорной скорости в электромобиле с двойным приводом можно управлять с помощью ED через кривую крутящий момент/скорость вращения электродвигателя, которая почти идеально адаптирована к кривой сопротивления-крутящего момента/скорости электромобиля. В случае криволинейного
Теперь вычислением опорной скорости в электромобиле с двойным приводом можно управлять с помощью ED через кривую крутящий момент/скорость вращения электродвигателя, которая почти идеально адаптирована к кривой сопротивления-крутящего момента/скорости электромобиля. В случае криволинейного
траектории или смены полосы движения каждое колесо управляется
через ED для удовлетворения требований движения.
Механическая нагрузка транспортного средства характеризуется многими крутящими моментами, которые считаются резистивными. К
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 инерционный момент определяется
следующее соотношение:
Fres = froll + faero + fslope
Froll = µ.mg
Faero = 1/2pCxSv2
Fslope =Mg.sinα
Основное назначение электронного дифференциала (ED) состоит в замене механического дифференциала в многоприводных системах, обеспечивающих требуемый крутящий момент для каждого ведущего колеса и допускающих различные скорости вращения колес.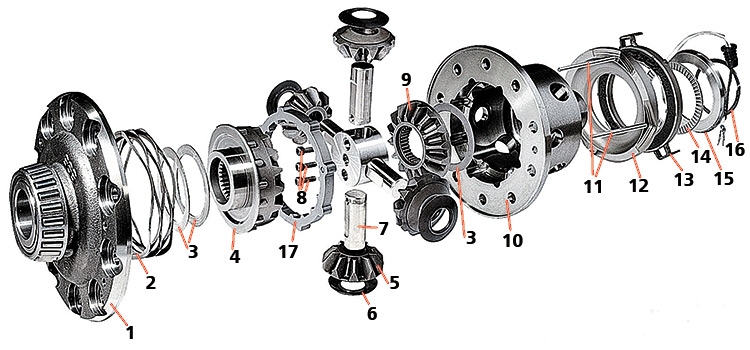
𝑑𝑤. 𝑡𝑎𝑛𝛿
∆𝑤 = 𝑤𝑟𝐿 — 𝑤𝑟𝑅 = 𝑤𝑉
𝐿𝑤
𝛿> 0 ⇒ 𝑇𝑢𝑟𝑛 𝑅𝑖𝑔ℎ𝑡
𝛿 = 0 ⇒ 𝑆𝑡𝑟𝑎𝑖𝑔ℎ𝑡 𝑎ℎ𝑒𝑎𝑑
𝛿 < 0 ⇒ 𝑇𝑢𝑟𝑛 𝑙𝑒𝑓𝑡
Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор) представляет собой семейство регуляторов. Они являются предпочтительным решением, когда контроллер необходим для замыкания контура и дает разработчику большее количество вариантов, и эти варианты означают, что есть больше возможностей для изменения динамики системы таким образом, чтобы помочь разработчику. ПИД-регулятор вычисляет значение «ошибки» как разницу между измеренной переменной процесса и желаемой уставкой. Контроллер пытается минимизировать ошибку, регулируя входы управления процессом. Он принимает значения энкодера колеса в качестве обратной связи и проверяет их снова и снова в замкнутом контуре, чтобы уменьшить ошибку.
𝑣𝐿 = 𝑤𝑉 �𝑅 +
𝑑𝑤
�
2
𝑣𝑅 = 𝑤𝑉 �𝑅 —
𝑑𝑤
�
2
𝑅 =
𝐿𝑤
𝑡𝑎𝑛𝛿
PID -контроллеры можно рассматривать как три термина — пропорциональные контроллеры — как пропорциональные контроллеры — это пропорциональные контроллеры. Термин, который обеспечивает общий контроль
Термин, который обеспечивает общий контроль
𝑤𝑟𝐿 =
𝑤𝑟𝑅 =
𝐿𝑤 + 𝑑𝑤 𝑡𝑎𝑛𝛿
𝐿𝑤
𝐿𝑤 — 𝑑𝑤 𝑡𝑎𝑛𝛿
𝐿𝑤
𝑤𝑉
𝑤𝑉
Действие, пропорциональное сигналу ошибки через коэффициент усиления прохода
и интегральный термин. , уменьшая установившееся состояние
ошибки за счет низкочастотной компенсации с помощью интегратора
и производной составляющей, улучшение переходной характеристики
за счет высокочастотной компенсации с помощью
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, выпуск 11, ноябрь-2013 1324
ISSN 2229-5518
дифференциатор — суммируются. ПИД-регуляторы также известны как трехчленные регуляторы и трехрежимные регуляторы.
В этом случае используются два мотор-редуктора постоянного тока. Электронный блок управления
выполняет следующие основные задачи:
1. Считывает калиброванное напряжение
потенциометра угла поворота рулевого колеса и на его основе рассчитывает угол поворота рулевого колеса
, а также определяет, движется ли автомобиль прямо, поворачивает ли он влево или вправо.
2 .Считывает напряжение потенциометра дроссельной заслонки, чтобы определить желаемую скорость автомобиля.
3. На основании приведенной выше информации соотношение двух
скоростей VL/VR вычисляется с использованием соответствующего уравнения, такого как приведенное ранее уравнение
4. Затем к каждому из двух двигателей применяется отдельный сигнал с широтно-импульсной модуляцией (ШИМ) в соответствии с требуемым соотношением скоростей.
Вышеупомянутая последовательность повторяется с очень высокой скоростью, так что ECU продолжает выполнять регулировки на постоянной основе.
Шина CAN (локальная сеть контроллеров) является стандартной шиной автомобиля. Он связывается с микроконтроллерами и устройствами в автомобиле без главного компьютера. Шина CAN — это протокол обмена сообщениями, разработанный специально для
для автомобильных приложений. CAN — это стандарт широковещательной последовательной шины
с несколькими ведущими устройствами для подключения электронных блоков управления
(ECU).
Здесь мы используем встроенные контроллеры Atmel семейства
со встроенной банкой. Контроллер CAN поможет нам обмениваться данными внутри автомобиля со скоростью до 1 Мбит/с без какого-либо хост-компьютера, получать данные с датчиков на очень высокой скорости в последовательной связи. Контроллер банки разработан в Matlab.
IJSER © 2013 http://www.ijser.org
Международный журнал научных и инженерных исследований, том 4, выпуск 11, ноябрь 2013 г.
При повороте рулевого колеса влево
При повороте рулевого колеса вправо
В этой статье ПИД-регулятор использовался для электронного дифференциала для управления электромобилем с двумя независимыми колесами. Электронный дифференциал обсуждался по сравнению с механическим дифференциалом, что доказывало, что это лучшее устройство с лучшими реализованными в нем функциями. Результаты работы электронной дифференциальной системы удовлетворительны, и двухколесный электромобиль с индивидуальным приводом может плавно двигаться как по прямой, так и по криволинейной траектории с использованием системы ПИД-регулирования с обратной связью.
1 . Када ХАРТАНИ, Мохамед БУРАХЛА, Яхия МИЛУД, Мохамед СЕКУР «Электронный дифференциал с нечетким управлением крутящим моментом для силовой установки автомобиля», том 17, № 1, 2009 г. © TUBITAK doi:10.3906/elk-0801-
2. P. Presage , Р. Кришнан. «Моделирование, симуляция и анализ приводов двигателей с постоянными магнитами, Часть I: Синхронный привод двигателей с постоянными магнитами», IEEE Transactions on Industry Applications Vol.25, №2, 265-273, 1989.
3.KH. Наг, Г. Чанг, Ю. Л.: Анализ, проектирование и технология системы ПИД-регулирования, IEEE Transaction on Control System Technology, Vol. 13, № 4, июль 2005 г., стр. 559.– 576
4. Милликен, Ф.В.; Милликен, Д.Л.: «Rave Car Vehicle
Dynamics», SAE International, 1995.
IJSER © 2013 http://www.ijser.org
Международный журнал научных и инженерных исследований, том 4, выпуск 11, ноябрь 2013 г. 1326
ISSN 2229-5518
5. Р.Э. Кольер и др., «Сравнение геометрии рулевого управления
для многоколесных транспортных средств с помощью моделирования и симуляции
», в материалах
IEEE CDC’9. 8, том. 3, pp. 3131-3133, December
8, том. 3, pp. 3131-3133, December
1998.
6. A. Ece Hartavi et al. , «Сигнальный интерфейс для электроники гибридных электромобилей и исследование реализации», в Proceedings of the IEEE ICVES’08 , Колумбус, Огайо (США), стр. 151-
156, сентябрь 2008 г.
IJSER © 2013 http ://www.ijser.org
Электронные дифференциалы повышенного трения | Как работает
Наконец, мы готовы перейти к сути дела: что такое eLSD? Это не последний триповый клубный наркотик для хорошего самочувствия, и он не связан с каким-либо паранормальным явлением или спортивным каналом, о котором мы слышали. Нет, все сводится к выполнению тех же задач, что и обычные самоблокирующиеся дифференциалы, часто с герметизированными гидромуфтами, только со сложной электронной тонкой настройкой.
Система eLSD гарантирует, что каждое колесо получает достаточный крутящий момент с помощью электронного блока управления , будь то микрокомпьютеры или главный компьютер автомобиля. Система в электронном виде отслеживает данные, поступающие от различных колесных датчиков, и в случае пробуксовки передает дополнительный крутящий момент на колесо или колеса с наибольшим сцеплением с дорогой. Некоторые модели даже позволяют водителям выбирать определенные настройки системы. Например, активный межосевой дифференциал Mitsubishi позволяет водителям выбирать определенные настройки для движения по дороге, гравию и снегу. Система eLSD также обеспечивает лучшую управляемость на скоростных поворотах и при смене полосы движения, выполняя все задачи стандартных дифференциалов только с компьютеризированной скоростью и точностью.
Система в электронном виде отслеживает данные, поступающие от различных колесных датчиков, и в случае пробуксовки передает дополнительный крутящий момент на колесо или колеса с наибольшим сцеплением с дорогой. Некоторые модели даже позволяют водителям выбирать определенные настройки системы. Например, активный межосевой дифференциал Mitsubishi позволяет водителям выбирать определенные настройки для движения по дороге, гравию и снегу. Система eLSD также обеспечивает лучшую управляемость на скоростных поворотах и при смене полосы движения, выполняя все задачи стандартных дифференциалов только с компьютеризированной скоростью и точностью.
Реклама
Система eLSD также может помочь при рыскании автомобиля . Если смотреть сверху, рыскание — это вращение автомобиля вокруг своей центральной точки во время поворота или смены полосы движения. В полноприводных автомобилях задние системы eLSD помогают держать заднюю часть автомобиля точно настроенной на направление передних колес, демпфируя рыскание. Если рыскание достаточно сильное, оно может отправить автомобиль в штопор. По этой причине eLSD иногда называют активными средствами контроля рыскания 9.0129 .
Если рыскание достаточно сильное, оно может отправить автомобиль в штопор. По этой причине eLSD иногда называют активными средствами контроля рыскания 9.0129 .
Итак, вот оно: системы eLSD представляют собой компьютеризированную модернизацию дифференциалов повышенного трения, обеспечивающую некоторым из самых роскошных автомобилей на рынке поистине превосходную управляемость. В настоящее время системы eLSD доступны в полноприводных автомобилях Saab, а также в различных моделях автомобилей Mitsubishi, General Motors и Jeep. Часто эта функция фигурирует в общей системе управления шасси или электронной системе стабилизации.
Воспользуйтесь приведенными ниже ссылками, чтобы узнать больше об автомобильных технологиях и управлении транспортными средствами.
Похожие статьи HowStuffWorks
Другие полезные ссылки
Источники
- «Активный контроль рыскания». Мицубиси Моторс. 2008 г. (13 ноября 2008 г.) http://www.mitsubishi-cars.co.uk/features/ayc.