Электромеханический вариатор. Вариатор на электродвигатель
Уникальная новинка на рынке силового электропривода / Статьи и обзоры / Элек.ру
13 июля 2009 г. в 13:04, 1849
Технический прогресс в области силовой электроники, микропроцессорных систем управления и высокоэнергетических магнитных материалов привел к тому, что современный электропривод по энергетическим характеристикам вплотную приблизился к теоретическому максимуму, определяющемуся конструкцией электрических машин. Привод без регулирования скорости или с неэкономичными способами регулирования уступает место приводам с частотным регулированием, которые обеспечивают высокий КПД в широком диапазоне работы. Казалось бы, прогресс механических элементов систем привода замедлился? Тем не менее, существует ряд областей применения, в которых не представляется возможным рациональным образом использовать электродвигатель и редуктор с постоянным передаточным отношением:
- Приводы с очень высокой кратностью пускового момента.
- Приводы с очень высокими кратковременными перегрузками, допускающие снижение скорости (мягкую характеристику).
- Приводы с высокоинерционной нагрузкой.
В перечисленных случаях электропривод с постоянным передаточным отношением редуктора не может быть оптимизирован сразу для всех режимов работы. Как правило, при проектировании таких приводов электродвигатель и редуктор подбирают под максимальный крутящий момент нагрузки, а в основных рабочих режимах привод существенно недоиспользуется по мощности. Масса, установленная мощность, а значит, и стоимость всех компонентов электропривода с постоянным передаточным отношением редуктора растут вместе с повышением перегрузочной способности. Пусковой и критический моменты асинхронного электродвигателя, как правило, не превышают номинальный более, чем в 1.5-2 раза. Электродвигатели постоянного тока с последовательным возбуждением, современные синхронные двигатели с возбуждением от постоянных магнитов, а также вентильно-индукторные электродвигатели обладают несколько более высокой перегрузочной способностью.
Ротор электродвигателя в составе привода, работающего на высокоинерционную нагрузку, в процессе пуска длительно разгоняется вместе с приводимым механизмом. Время разгона механизма при постоянном передаточном отношении редуктора больше, чем можно было бы обеспечить, заменив редуктор вариатором, способным непрерывно изменять передаточное отношение в процессе разгона.
Наиболее распространенные дисковые планетарные вариаторы имеют ограниченное применение в силу ряда недостатков. Несмотря на то, что диапазон регулирования передаточного отношения может достигать 6, перегрузочная способность таких вариаторов, то есть отношение максимального выходного крутящего момента к номинальному, не превышает 2-3, причем КПД резко снижается с ростом нагрузки. Большинство существующих вариаторов имеет малую скорость регулирования передаточного отношения и не допускают его изменения в остановленном состоянии. Поэтому применение таких вариаторов ограничивается приводами с малым диапазоном регулирования скорости и момента.
Разработанный уникальный адаптивный дисковый планетарный вариатор конструкции д.т.н. проф. Н. В. Гулиа позволил создать принципиально новый класс электропривода, обладающий мягкой внешней механической характеристикой с очень высоким пусковым моментом (рис. 1), перегрузочной способностью и возможностью автоматического регулирования передаточного отношения при любых изменениях нагрузки. Конструкция вариаторов оптимизирована для достижения высокого КПД в широком диапазоне режимов работы. В отличие от зубчатых и червячных редукторов, вариаторы не имеют люфта и обладают функциональностью предохранительной муфты при перегрузке по выходному моменту. В приводах с высокоинерционной нагрузкой такие мотор-вариаторы обеспечат наименьшее время разгона до номинальной частоты по сравнению с любым другим типом привода равной мощности.
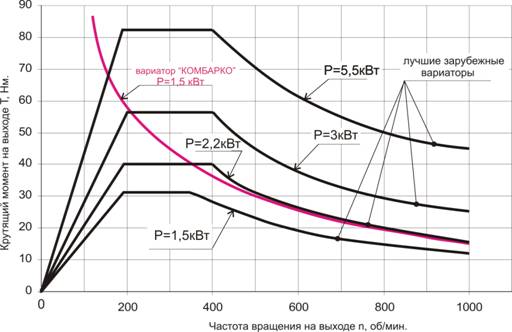
Рис. 1 Внешняя механическая характеристика адаптивных вариаторов в сравнении с ныне существующими конструкциями
Производственная гамма в настоящее время представлена двумя основными типами адаптивных мотор-вариаторов:
Автоматический мотор-вариатор с прямым включением электродвигателя является недорогим решением и может применяться в нерегулируемом электроприводе, требующим мягкой механической характеристики с высокой перегрузочной способностью (до 9 раз). При этом двигатель подключается к сети напрямую, и не создает радиочастотных помех, свойственных приводам с преобразователями частоты.
Примеры использования: мешалки, дробилки, объемные насосы, различные подъемно-транспортные механизмы
Автоматический мотор-вариатор с частотным управлением электродвигателем может быть использован в системах регулируемого электропривода, требующего значительного диапазона регулирования, высоких динамических характеристик и очень большого пускового момента (до 12 раз превышающего номинальный). Датчик частоты вращения выходного вала обеспечивает возможность точного регулирования скорости привода.
Примеры использования: приводы конвейеров, различные подъемно-транспортные механизмы, системы следящего привода.
В таблице представлено сравнение разработанных адаптивных мотор-вариаторов с другими типами электропривода — асинхронным электроприводом с преобразователем частоты (далее ПЧ-АД) и планетарными дисковыми мотор-вариаторами с прямым включением электродвигателя в сеть.
| Диапазон принудительного регулирования скорости | Значительный | Средний | Значительный |
| Пусковой момент | Малый | Средний | Высокий |
| Динамическая перегрузочная способность | Малая | Средняя | Высокая |
| Динамика регулирования | Высокая | Низкая | Высокая |
| КПД в диапазоне регулирования и долговечность | Очень высокие | Низкие | Высокие |
| Влияние на питающую сеть в пусковом режиме (пусковой ток) | Низкое | Высокое | Низкое |
| Влияние на питающую сеть в номинальном режиме (электромагнитные помехи) | Высокое | Низкое | Низкое |
| Масса и габариты (при равных величинах максимального момента и номинальной частоты вращения) | Значительные | Значительные | Малые |
Диапазон принудительного регулирования скорости. Во многих случаях требуется регулирование скорости электропривода. В системах, требующих «мягкой» механической характеристики (например, приводы мешалок и дробилок), могут применяться адаптивные мотор-вариаторы, скорость вращения которых при изменении нагрузки автоматически изменяется до 9..10 раз, при этом крутящий момент изменяется в обратной пропорции. В системах, требующих принудительного регулирования скорости в широком диапазоне, могут применяться адаптивные мотор-вариаторы с частотным регулированием. Диапазон регулирования скорости различных типов привода составляет:
- ПЧ-АД: 1:100 и более.
- Планетарные дисковые мотор-вариаторы: до 1:6.
- Адаптивные мотор-вариаторы: до 1:8 (авторегулирование).
- Адаптивные мотор-вариаторы с частотным регулированием: до 1:100.
Пусковой момент и динамическая перегрузочная способность. Во многих случаях нагрузка при пуске привода может значительно превышать номинальную, особенно в механизмах, эксплуатируемых на открытом воздухе в холодное время года. Динамическая перегрузочная способность определяет работоспособность привода при резком увеличении нагрузки. Современные преобразователи частоты обладают высоким быстродействием, но перегрузочная способность асинхронного электропривода все равно редко превышает величину номинального момента более, чем в 2 раза. Перегрузочная способность существующих вариаторов определяется моментом начала интенсивного проскальзывания фрикционных элементов, которое, как правило, наступает при нагрузке, в 2..3 раза превышающей номинальную. На малых передаточных отношениях перегрузочная способность падает до 1.5 от номинального момента, так как при пуске или резком повышении нагрузки система регулирования вариатора не в состоянии быстро увеличить его передаточное отношение. Адаптивный вариатор способен автоматически изменять передаточное отношение в зависимости от нагрузки, в том числе в остановленном состоянии, что совместно с перегрузочной способностью двигателя в кратковременных тяжелых режимах и при пуске обеспечивает максимальный момент, до 9..12 раз превышающий номинальный.
- ПЧ-АД: 150..200% от номинального момента.
- Планетарные дисковые мотор-вариаторы: 150..300% от номинального момента.
- Адаптивные вариаторы: 900..1200% от номинального момента.
Динамика регулирования определяет способность привода быстро подстроиться под изменяющиеся условия работы: задаваемую скорость и момент нагрузки. Частотно-регулируемый привод и адаптивные мотор-вариаторы имеют наилучшую динамику регулирования, что делает возможным их применение в системах следящего привода и других случаях, требующих быстрого регулирования скорости. Существующие мотор-вариаторы с прямым включением электродвигателя регулируются путем воздействия на элементы вариатора и имеют крайне ограниченное быстродействие регулирования. Время регулирования по всему диапазону скорости (при малом моменте инерции нагрузки) для различных типов привода (мощностью 1.5 кВт) составляет:
- ПЧ-АД: менее 1 с.
- Планетарные дисковые мотор-вариаторы: более 200 с.
- Адаптивные вариаторы: 1..2 с.
КПД в диапазоне регулирования и долговечность. В сравнении с существующими мотор-вариаторами, адаптивные приводы имеют более высокий КПД в широком диапазоне режимов работы за счет планетарной схемы, оптимизированного прижима фрикционных элементов и разгруженных от сил прижима опор. В режимах, близких к номинальным, адаптивные вариаторы обеспечивают КПД до 96%. В тяжелых режимах работы привода электродвигатель остается в номинальном режиме, сохраняя высокий КПД, что позволяет добиться минимального энергопотребления. В качестве смазочных материалов применяются специальные высокотяговые масла. Все эти факторы обеспечивают наивысшую долговечность адаптивных приводов по сравнению со всеми существующими мотор-вариаторами.
Влияние на питающую сеть в пусковом режиме (пусковой ток). При прямом пуске асинхронного электродвигателя, присоединенного к вариатору, пусковой ток в несколько раз превышает номинальный, причем с ростом момента инерции нагрузки негативное влияние на питающую сеть увеличивается. Разработанные мотор-вариаторы за счет адаптивной характеристики передаточного отношения обеспечивают быстрый переход электродвигателя в номинальный режим при пуске, что во многих случаях снижает пусковую нагрузку на сеть по сравнению с существующими мотор-вариаторами. Частотно-регулируемый асинхронный электропривод, равно как и адаптивные мотор-вариаторы, не перегружают питающую сеть в процессе пуска.
Влияние на питающую сеть в номинальном режиме (электромагнитные помехи). Электроприводы, содержащие преобразователи частоты, являются источниками электромагнитных помех, которые могут нарушить работу различных электронных устройств. Однако, грамотный монтаж преобразователей, применение дросселей, экранированных кабелей и радиочастотных фильтров в значительной степени решают эту проблему.
Масса и габариты (при равных величинах максимального момента и номинальной частоты вращения). Для тяжелых условий работы, с высокими пусковыми и перегрузочными моментами электропривод подбирают по величине максимального момента. При этом в номинальном режиме работы привод оказывается существенно недогруженным по крутящему моменту и току. Применение адаптивных мотор-вариаторов в таких случаях позволит существенно уменьшить массу и габариты приводов. Примерные величины массы приводов различных типов (для величины максимального момента 150 Нм и номинальной частоты 1500 об/мин) составляют:
- ПЧ-АД: 90 кг (двигатель и преобразователь частоты на 9 кВт)
- Зарубежные мотор-вариаторы: 80 кг (двигатель на 6 кВт)
- Адаптивные вариаторы: 20..25 кг (двигатель и преобразователь частоты на 1.5 кВт)
Рис. 2
Существует ряд производственных механизмов с высоким приведенным моментом инерции и необходимостью частых пусков (конвейеры, центрифуги, приводы манипуляторов). Если допускаются повышенные ускорения, применение адаптивных мотор-вариаторов в подобных случаях позволит как минимум вдвое уменьшить время разгона до номинальной скорости, что повысит производительность механизма при той же мощности разгонного привода (рис. 2).
Таким образом, адаптивные мотор-вариаторы обладают комплексом уникальных потребительских свойств, которые позволят значительно снизить массу, металлоемкость и стоимость приводов, работающих в особо тяжелых условиях. Также адаптивные вариаторы могут быть применены в сочетании с редукторами любого типа для получения необходимых механических характеристик привода.
Д.т.н., профессорГулиа Нурбей Владимирович
ИнженерДавыдов Виталий Владимирович
www.elec.ru
Электромеханический вариатор
Изобретение относится к электротехнике, к электродинамическим устройствам для передачи механической энергии от ведущего вала к ведомому и может быть использовано в трансмиссиях транспортных средств в качестве автоматического вариатора скорости и крутящего момента. Технический результат состоит в расширении функциональных возможностей. Электромеханический вариатор выполнен в виде электрически связанных между собой генератора и электродвигателя. Он оснащен двумя соосно установленными индукторами с обмотками возбуждения, одним общим для двигателя и генератора якорем с обмоткой, подключенной к своему токосъемному узлу. Обмотку якоря пересекают магнитные потоки обоих индукторов и индуцируют в ней ЭДС, направленные навстречу друг другу. Ведущий вал вариатора соединен с общим якорем. Один из индукторов выполнен неподвижным, а второй индуктор выполнен вращающимся и связан с ведомым валом вариатора. Обмотка возбуждения вращающегося индуктора снабжена самостоятельным токосъемным узлом. Этот узел, в зависимости от требуемого направления вращения ведомого вала по отношению к ведущему, обеспечивает возможность подключения обмотки возбуждения вращающегося индуктора к независимому источнику постоянного тока или к токосъемному узлу обмотки якоря. Обмотка возбуждения неподвижного индуктора при этом подключена к токосъемному узлу обмотки якоря или независимому источнику постоянного тока соответственно. 3 з.п. ф-лы, 2 ил.
Изобретение относится к электродинамическим устройствам для передачи механической энергии от ведущего вала к ведомому, работающим как в режиме двигателя, так и в режиме генератора, и может быть использовано в трансмиссиях транспортных средств в качестве автоматического вариатора скорости и крутящего момента.
Известен электромеханический вариатор с ведущим и ведомым валами, выполненный в виде электрически связанных между собой генератора и электродвигателя, имеющий два соосно установленных индуктора с обмотками возбуждения, одна из которых электрически соединена с независимым источником постоянного тока, один общий для двигателя и генератора якорь с обмоткой, пересекаемой магнитными потоками обоих индукторов, индуцирующих в ней ЭДС, направленные навстречу друг другу, и подключенной к своему токосъемному узлу, причем ведущий вал вариатора соединен с общим якорем, один из индукторов выполнен неподвижным, а второй индуктор выполнен вращающимся и связан с ведомым валом вариатора (см. патент SU 157707, кл. Н02K 51/00, опубл. 07.07.1990). Недостатками известного устройства являются передача вращения только в одну сторону, а также невозможность подключения дополнительных источников или потребителей энергии.
Задачей изобретения является устранение указанных недостатков. Технический результат заключается в расширении функциональных возможностей вариатора. Поставленная задача решается, а технический результат достигается тем, что электромеханический вариатор с ведущим и ведомым валами выполнен в виде электрически связанных между собой генератора и электродвигателя, имеющий два соосно установленных индуктора с обмотками возбуждения, одна из которых электрически соединена с независимым источником постоянного тока, один общий для двигателя и генератора якорь с обмоткой, пересекаемой магнитными потоками обоих индукторов, индуцирующих в ней ЭДС, направленные навстречу друг другу, и подключенной к своему токосъемному узлу, причем ведущий вал вариатора соединен с общим якорем, один из индукторов выполнен неподвижным, а второй индуктор выполнен вращающимся и связан с ведомым валом вариатора, причем обмотка возбуждения вращающегося индуктора снабжена самостоятельным токосъемным узлом, выполненным с возможностью подключения, в зависимости от требуемого направления вращения ведомого вала по отношению к ведущему, к независимому источнику постоянного тока или к токосъемному узлу обмотки якоря, а обмотка возбуждения неподвижного индуктора при этом подключена к токосъемному узлу обмотки якоря или независимому источнику постоянного тока соответственно. Токосъемный узел якоря может быть выполнен в виде коллектора с щетками или токосъемных колец с щетками и выпрямителем тока. Токосъемный узел вращающегося индуктора может быть выполнен в виде коллектора с щетками или щеток с токосъемными кольцами и оснащен датчиком положения и устройством формирования и подачи питающего напряжения. Через токосъемный узел якоря последовательно или параллельно с обмоткой возбуждения одного из индукторов могут быть подключены другие независимые потребители/источники электроэнергии, например аккумуляторная батарея.
На фиг.1 схематически изображен вариатор с вращением ведущего и ведомого валов в одну сторону;
на фиг.2 - вариатор с вращением ведущего и ведомого валов в разные стороны.
Электромеханический вариатор состоит из неподвижного индуктора 1 с обмоткой возбуждения 2, вращающегося якоря 3, соединенного с ведущим валом 4, и вращающегося индуктора 5 с обмоткой возбуждения 6, соединенного с ведомым валом 7. Якорь 3 имеет обмотку 8, секции которой соединены с пластинами коллектора 9. Секции обмотки возбуждения 6 вращающегося индуктора 5 соединены с пластинами коллектора 10. Электрический контакт с пластинами коллектора 9 обеспечивают неподвижные щетки 11, а электрический контакт с пластинами коллектора 10 обеспечивают неподвижные щетки 12.
Направление магнитных потоков неподвижного 1 и вращающегося 5 индукторов противоположно друг другу, что показано стрелками на фиг.1 и фиг.2. Независимый источник постоянного тока 13, в зависимости от требуемого направления вращения ведомого вала, питает обмотки возбуждения или неподвижного индуктора (фиг.2), или вращающегося индуктора (фиг.1).
Электромеханический вариатор, изображенный на фиг.1, работает следующим образом.
При прохождении постоянного тока от источника 13 через щетки 12 и коллектор 10 по обмотке возбуждения 6 вращающегося индуктора 5, в последнем возникает магнитный поток. При вращении в магнитном потоке индуктора 5 якоря 3 в его обмотке 8 наводится ЭДС, которая через коллектор 9 и щетки 11 вызывает прохождение постоянного тока по обмотке возбуждения 2 неподвижного индуктора 1. Прохождение постоянного тока по обмотке возбуждения 2 неподвижного индуктора 1 вызывает в нем возникновение магнитного потока, направленного против магнитного потока индуктора 5. При вращении в магнитном поле индуктора 1 якоря 3 в его обмотке 8 наводится ЭДС, направленная против ЭДС, индуцируемой магнитным полем индуктора 5, что приводит к уменьшению тока, протекающего по обмотке 8 якоря 3 и по обмотке 2 индуктора 1, уменьшая магнитный поток последнего. В итоге ток в обмотках 8 и 2 устанавливается на таком уровне, чтобы разность ЭДС, наводимых в обмотке 8 якоря 3 от пересечения ею магнитных потоков индукторов 5 и 1, компенсировала электрические потери в обмотках 8 и 2 от прохождения в них постоянного тока. Взаимодействие магнитного потока индуктора 5, связанного с ведомым валом 7, с током, протекающим по обмотке 8 якоря 3, приводит к возникновению вращающего момента на индукторе 5 и он начинает вращаться в одну сторону с вращением якоря 3, связанного с ведущим валом 4 вариатора. При увеличении скорости вращения ведомого вала и связанного с ним индуктора 5 происходит уменьшение относительной скорости пересечения магнитным потоком индуктора 5 обмотки 8 якоря 3. Это приводит к уменьшению составляющей ЭДС, наводимой в обмотке 8 якоря 3 от пересечения ею магнитного потока индуктора 5, что, в свою очередь, уменьшает общую разность ЭДС и уменьшает силу тока, протекающего по обмоткам 8 и 2. В итоге вращающий момент на ведомом валу также уменьшается. Таким образом, в электромеханическом вариаторе реализуется автоматическое уменьшение вращающего момента на ведомом валу с увеличением скорости его вращения.
Электромеханический вариатор, изображенный на фиг.2, работает следующим образом.
При прохождении постоянного тока от источника 13 по обмотке возбуждения 2 неподвижного индуктора 1, в последнем возникает магнитный поток. При вращении в магнитном потоке индуктора 1 якоря 3 в его обмотке 8 наводится ЭДС, которая через коллекторы 9 и 10 и щетки 11 и 12 вызывает прохождение постоянного тока по обмотке возбуждения 6 вращающегося индуктора 5. Прохождение постоянного тока по обмотке возбуждения 6 вращающегося индуктора 5 вызывает в нем возникновение магнитного потока, направленного против магнитного потока индуктора 1. При вращении в магнитном поле индуктора 5 якоря 3 в его обмотке 8 наводится ЭДС, направленная против ЭДС, индуцируемой магнитным полем индуктора 1, что приводит к уменьшению тока, протекающего по обмотке 8 якоря 3 и по обмотке 6 индуктора 5, уменьшая магнитный поток последнего. В итоге ток в обмотках 8 и 6 устанавливается на таком уровне, чтобы разность ЭДС, наводимых в обмотке 8 якоря 3 от пересечения ею магнитных потоков индукторов 5 и 1, компенсировала электрические потери в обмотках 8 и 6 от прохождения в них постоянного тока. Взаимодействие магнитного потока индуктора 5, связанного с ведомым валом 7, с током, протекающим по обмотке 8 якоря 3, приводит к возникновению вращающего момента на индукторе 5 и он начинает вращаться в сторону, противоположную вращению якоря 3, связанного с ведущим валом 4 вариатора. При увеличении скорости вращения ведомого вала и связанного с ним индуктора 5 происходит увеличение относительной скорости пересечения магнитным потоком индуктора 5 обмотки 8 якоря 3. Это приводит к увеличению составляющей ЭДС, наводимой в обмотке 8 якоря 3 от пересечения ею магнитного потока индуктора 5, что, в свою очередь, уменьшает общую разность ЭДС и уменьшает силу тока, протекающего по обмоткам 8 и 6. В итоге вращающий момент на ведомом валу также уменьшается. Таким образом, в электромеханическом вариаторе реализуется автоматическое уменьшение вращающего момента на ведомом валу с увеличением скорости его вращения.
Таким образом, реверсирование вращения ведомого вала по отношению к ведущему валу можно легко осуществлять простым электрическим переключением обмоток вариатора согласно схемам, изображенным на фиг.1 и фиг.2. Если к щеткам 11 подключить дополнительный потребитель электроэнергии, например аккумуляторную батарею, то электромеханический вариатор будет работать не только как преобразователь крутящего момента, но и как генератор электроэнергии. Если к щеткам 11 подключить дополнительный источник электроэнергии, например аккумуляторную батарею, то это вызовет дополнительное увеличение мощности и момента на ведомом валу.
1. Электромеханический вариатор с ведущим и ведомым валами, выполненный в виде электрически связанных между собой генератора и электродвигателя, имеющий два соосно установленных индуктора с обмотками возбуждения, одна из которых электрически соединена с независимым источником постоянного тока, один общий для двигателя и генератора якорь с обмоткой, пересекаемой магнитными потоками обоих индукторов, индуцирующих в ней ЭДС, направленные навстречу друг другу, и подключенной к своему токосъемному узлу, причем ведущий вал вариатора соединен с общим якорем, один из индукторов выполнен неподвижным, а второй индуктор выполнен вращающимся и связан с ведомым валом вариатора, отличающийся тем, что обмотка возбуждения вращающегося индуктора снабжена самостоятельным токосъемным узлом, выполненным с возможностью подключения в зависимости от требуемого направления вращения ведомого вала по отношению к ведущему к независимому источнику постоянного тока или к токосъемному узлу обмотки якоря, а обмотка возбуждения неподвижного индуктора при этом подключена к токосъемному узлу обмотки якоря или независимому источнику постоянного тока соответственно.
2. Электромеханический вариатор по п.1, отличающийся тем, что токосъемный узел якоря выполнен в виде коллектора с щетками или токосъемных колец с щетками и выпрямителем тока.
3. Электромеханический вариатор по п.1, отличающийся тем, что токосъемный узел вращающегося индуктора выполнен в виде коллектора с щетками или щеток с токосъемными кольца и оснащен датчиком положения и устройством формирования и подачи питающего напряжения.
4. Электромеханический вариатор по п.1, отличающийся тем, что через токосъемный узел якоря последовательно или параллельно с обмоткой возбуждения одного из индукторов подключены другие независимые потребители/источники электроэнергии, например аккумуляторная батарея.
www.findpatent.ru
Электромобильный вариатор
Изобретение относится к машиностроению. Электомобильный вариатор содержит ведущий вал-водило 2, сателлитные блоки 6, центральное колесо 7 и механизм его осевого перемещения. Сателлитные блоки 6, выполненные в виде подпружиненных в осевом направлении несимметричных сателлитов 27 с коническими поверхностями противоположной конусности и зубчатых венцов, обеспечивают при обкатке по венцу центрального колеса 7 остановку, минимальную и максимальную редукцию, а также любую промежуточную скорость при фрикционном контактировании с подвижным кольцом 11 центрального колеса 7. Повышены надежность и удобства в управлении вариатором, способным обеспечить плавное изменение скорости, торможение и пуск без механизма сцепления. 2 з.п. ф-лы, 7 ил.
Изобретение относится к области машиностроения, в частности вариаторостроения, и предназначается для использования в механических и транспортных средствах - электромобилях - в качестве устройства согласования мощности электродвигателя с крутящим моментом ведущих колес, регулирования скорости и обеспечения режима генерации тока при принудительном вращении ведомого вала.
Известны транспортные вариаторы разнообразных конструкций, которые могут быть применены в том числе и для электропривода. Например, вариатор "унвартор Черняева" по патенту СССР 1820097, кл. F 16 H 15/50, 1992 г. содержит вал-водило, шарнирно установленные, подпружиненные конические сателлиты, центральное колесо с внутренней рабочей поверхностью и планетарный механизм с ведомым валом. Однако конструкция этого вариатора требует применения специального профиля зубьев планетарного зацепления, что приводит к ограничению мощности привода. Известен вариатор по патенту США 3793910, кл. F 16 H 15/50, 1974 г., содержащий корпус, ведущий и ведомый валы, водило, сателлиты в виде валиков с противоположной конусностью, центральные колеса с наружной и внутренней рабочей поверхностью, зубчатый планетарный механизм и механизм встречного осевого перемещения колец центральных колес. Недостатком этого вариатора является большая сложность механизма осевого перемещения центральных колес и невозможность обратной связи входа и выхода, что делает скорость ведомого вала во всех режимах неустойчивой. Наиболее близким к изобретению является транспортный вариатор "трансунвартор Черняева" по патенту РФ 2052689, кл. F 16 H 15/52, 1996 г., который и принят за прототип. Этот транспортный вариатор содержит корпус, ведущий вал-водило, ведомый вал с зубчатым колесом, сателлитные блоки в виде валиков с конической поверхностью, расположенных на радиально подпружиненных подвесках параллельно оси валов и снабженных зубчатым венцом, центральное колесо с внутренними рабочими поверхностями, промежуточные шестерни и механизм осевого перемещения центрального колеса с тросом и возвратной пружиной. Передача крутящего момента от вала-водила идет через сателлиты, обкатывающие внутреннюю рабочую поверхность центрального колеса, зубчатые венцы сателлитных блоков и промежуточные шестерни на зубчатое колесо ведомого вала, где соединяются противоположно направленные окружные скорости промежуточных шестерен и окружная скорость вала-водила. С результирующей окружной скоростью вращается зубчатое колесо и соответственно ведомый вал. Недостатком транспортного вариатора является его неоправданная сложность при использовании его в качестве электромобильного привода, когда отпадает необходимость в автоматике процессов ДВС, механическом обеспечении реверса и в прямом соединении валов. С другой стороны, из-за необходимости на электромобиле обеспечивать режим генерации при езде "накатом" планетарная конструкция выхода транспортного вариатора оказывается неработоспособной, так как в этом случае принудительное вращение ведомого вала /колес/ ведет к принудительному вращению ведущего вала в противоположном направлении, что требует разобщения сателлитов и рабочих поверхностей центрального колеса, а следовательно, исключению возможности работы электродвигателя в режиме генератора. Кроме того, в прототипе для возврата механизма центрального колеса в исходное положение используется пружина, которая, естественно, при растяжении непрерывно повышает сопротивление, что утомляет водителя. Целью изобретения является создание электромобильного вариатора - надежного и удобного в эксплуатации устройства, дающего возможность работы электродвигателя в режиме генератора и способного обеспечить управление, в том числе плавное изменение скорости, торможение приводом и пуск без механизма сцепления, единственной педалью, которая не обладает возрастающим усилием возврата в исходное положение. Для достижения цели транспортный вариатор, содержащий корпус, ведущий вал-водило, ведомый вал с зубчатым колесом, сателлитные блоки в виде валиков с конической поверхностью, расположенных на радиально подпружиненных подвесках параллельно оси валов и снабженных зубчатыми венцами, зацепляемыми с промежуточными шестернями, центральное колесо и механизм его осевого перемещения с тросом и возвратной пружиной, выполнен с условием противоположного вращения ведущего и ведомого валов, что обеспечивается подпружиненными в осевом направлении сдвоенными несимметричными сателлитами с поверхностями противоположной конусности, на стыке которых расположены зубчатые венцы "нулевой скорости", в отличие от прототипа имеющие наибольший диаметр по сравнению с зубчатыми венцами "максимальной" и "минимальной редукции", выполненными на стороне большей конусности каждого сдвоенного несимметричного сателлита, в то время как на стороне меньшей конусности размещены цилиндрические пояски, обеспечивающие зазоры зубчатых зацеплений, и конструкцией центрального колеса в виде неподвижного кольца с внутренним зубчатым венцом и подвижного кольца с фрикционным внутренним ободом. Для варианта применения электромобильного вариатора с электродвигателем повышенной мощности предусматривается конструкция центрального колеса, которое содержит два неподвижных кольца с внутренним зубчатым зацеплением, расположенных по краям корпуса, и два подвижных кольца, имеющих каждое по два или более обода с внутренними фрикционными поверхностями, при этом каждый сателлитный блок содержит один или несколько сдвоенных симметричных сателлита и два сдвоенных несимметричных сателлита, которые также подпружинены в осевом направлении в сторону подвижных колец для обеспечения расцепления зубчатых соединений. Трос возвратной пружины, создающей усилие возврата механизма осевого перемещения центрального колеса в исходное положение, соединен с управляющим кольцом механизма через сектор, изменяющий плечо при повороте и, таким образом, обеспечивающий равномерное давление на педаль управления во всех ее положениях. На фиг. 1 изображен электромобильный вариатор в продольном разрезе. Показан вариант с одним сдвоенным несимметричным сателлитом в каждом сателлитном блоке. В продольном положении сателлиты показаны в промежуточном состоянии фрикционного контактирования. При движении влево большие зубчатые венцы сателлитов войдут в зацепление с внутренним зубчатым венцом неподвижного кольца центрального колеса. На фиг. 2 - схема электромобильного вариатора в аксонометрии. Изображен вариант двухблочного вариатора, в отличие от четырехблочного, изображенного на фиг. 1. Вариант используется при малой мощности электродвигателя. Около элементов планетарной передачи приведены их обозначения теми же индексами, которые использованы в формуле передаточного числа транспортного вариатора-прототипа. Стрелками показано направление вращения ведущего, промежуточных и ведомого валов, а также направление перемещения подвижного кольца центрального колеса. На фиг. 3 изображена установка электромобильного вариатора на электромобиле с заднеприводными колесами. Стрелка около педали управления показывает направление управляющего тросика от педали к месту установки контроллера и других электроприборов. На фиг. 4 - разрез по Б-Б на фиг. 3, показано соединение комплекта "вариатор - электродвигатель" с одним из задних колес электромобиля и привод подвижного кольца центрального колеса вариатора. На фиг. 5 - разрез по А-А на фиг. 1. Изображен планетарный механизм четырехблочного электромобильного вариатора и прижим сателлитных блоков к центральному колесу. На фиг. 6 изображен сателлитный блок с трехвенцовым сдвоенным несимметричным сателлитом. На фиг. 7 изображен вариант электромобильного вариатора для электродвигателя повышенной мощности. Электромобильный вариатор состоит из корпуса 1, ведущего вала-водила 2, соединенного с валом электродвигателя 3 и снабженного фланцами 4 со штангами 5, между которыми шарнирно установлены сателлитные блоки 6, сателлиты которых контактируют с рабочими поверхностями центрального колеса 7. Центральное колесо в упрощенном варианте состоит из неподвижного кольца 8, с внутренним зубчатым венцом 9 с фрикционной фаской 10, подвижного кольца 11 с фрикционным внутренним ободом 12 и механизма его осевого перемещения в виде сквозных прямых пазов 13 в корпусе и наклонных пазов 14 /фиг. 4/ в подвижном кольце, соединенных роликами 15, оси 16 которых крепятся в управляющем кольце 17. Для облегчения осевого перемещения подвижное кольцо имеет продольные пазы 18 с шаровыми опорами 19. Каждый сателлитный блок /фиг. 6/ снабжен распорной трубой 20, которая соединяет штанги вала-водила и является осью вращения для подвесок 21. В щеках 22 подвесок установлены подшипники 23 шлицевого вала 24, который заканчивается зубчатым венцом-шестерней 25, закрепленной на валу винтами 26. На шлицах шлицевого вала каждого сателлитного блока имеет возможность осевого перемещения сдвоенный несимметричный сателлит 27 с рабочими поверхностями меньшей конусности 28 и большей конусности 29. Сателлит большей конусности имеет зубчатый венец 30 "минимальной редукции" и при необходимости зубчатый венец 31 "максимальной редукции". Сателлит меньшей конусности снабжен опорными цилиндрическими поясками 32, 33 для обеспечения осевого зазора зацеплений венцов "максимальной" и "минимальной редукции", а также зубчатого зацепления зубчатого венца 34 "нулевой скорости". При малой разнице наружных диаметров венцов 31 и 34 сателлиты соединяются между собой через переходное кольцо 35. В сторону меньшей конусности сдвоенный несимметричный сателлит подпружинен пружиной 36. Для обеспечения контактирования зубчатых зацеплений на малой частоте оборотов ведущего вала-водила сателлитные блоки отжимаются в сторону центрального колеса пластинчатыми пружинами 37. Зубчатые венцы-шестерни 25 каждого сателлитного блока зацепляются с шестернями 38 зубчатых пар, выходные шестерни 39 которых в свою очередь зацеплены с зубчатым колесом 40 ведомого вала 41, снабженного подшипниковым гнездом 42 для осевой установки опорного конца ведущего вала-водила. Электромобильный вариатор, как и прототип, снабжен педалью 43, которая имеет подпружиненный поворот вокруг оси 44 для управления через трос 45 в боуденовой оболочке электросистемой экономичного плавного или ступенчатого изменения скорости электродвигателя и, кроме того, имеет возможность продольного перемещения вместе со штангой 46, которая соединена тросом 47, идущим через блок 48 с управляющим кольцом по его кольцевой канавке. Во второй кольцевой канавке управляющего кольца закреплен трос 49, идущий через поворотный сектор 50 на возвратную пружину 51. При необходимости увеличить мощность передачи может быть применен вариант электромобильного вариатора с двумя сдвоенными несимметричными сателлитами в блоке. В этом случае центральное колесо состоит из двух подвижных колец 52, каждое из которых имеет по два или более обода с внутренними поверхностями фрикционного зацепления. Центральные сдвоенные сателлиты 53 выполнены симметричными. Управляющее кольцо 54 в этом случае занимает всю ширину корпуса, в котором выполнено также два прямых паза, а в подвижных кольцах два противоположно направленных наклонных паза. Ролики 15, взаимодействуя с пазами, также сводят или разводят подвижные кольца. Работает электромобильный вариатор следующим образом. Изменение частоты ведомого вала электромобильного вариатора осуществляется по принципу трансунвартора, принятого за прототип. При вращении ведущего вала-водила 2 его окружная скорость, приведенная к диаметру зубчатого колеса 40 ведомого вала, вычитается из противоположно направленной окружной скорости промежуточных шестерен 39, и в зависимости от соотношения этих скоростей на зубчатом колесе ведомого вала образуется результирующая величина окружной скорости. Окружная скорость промежуточных шестерен 39 в свою очередь зависит от всех прочих элементов передачи. То есть скорость ведомого вала и направление его вращения - а в электромобильном вариаторе направление вращения ведомого вала противоположно по отношению к ведущему валу-водилу - зависит от соотношения работающих диаметров 27, 28, диаметров зубчатых венцов-шестерен 25, диаметров зубчатых или фрикционных ободов колец 8, 11 и диаметра зубчатого колеса 40. То, что электромобильный вариатор работает в зоне "реверса", связано с нижеследующими причинами. Передаточное число электромобильного вариатора, как и транспортного вариатора определяется формулой В зависимости от соотношения элементов формулы передаточное число может иметь положительное или отрицательное значение. Положительное значение передаточного числа означает, что ведущий вал-водило и ведомый вал вращаются в одном направлении. Как это сказывается на работе механизма при езде "накатом" с неотключенным двигателем, т.е. когда ведомый вал приводится во вращение колесами катящегося под уклон веломобиля? При езде "накатом" принудительное вращение ведомого вала колесами заставляет сателлиты вращаться в том же направлении, что приводит к принудительному вращению ведущего вала в противоположном направлении. Конечно, это вращение произойдет, если сателлиты контактируют с центральным колесом. Фактически, у транспортного вариатора обороты ДВС и ведущего вала сброшены, так как для инерционного пробега мощность ДВС не расходуется. Центробежная сила сателлитов уменьшается, что приводит к их разобщению с центральным колесом, и инерционный пробег обеспечивается. Для электромобильного вариатора такое положение вещей не подходит, так как электромобиль вынужден из соображений утилизации энергии проходить инерционный пробег в генераторном режиме электродвигателя. Выходом из положения является работа электромобильного вариатора в реверс-зоне. В этом случае обеспечивается постоянство направления вращения всех элементов передачи как в рабочем режиме электродвигателя, так и в режиме генератора. При достаточном запасе энергии инерционного движения в положении элементов вариатора, обеспечивающих передаточное число, равное двум-трем /при дальнейшем увеличении передаточного числа наступит самоторможение/, инерционное вращение зубчатого колеса ведомого вала приведет к противоположному вращению ротора электродвигателя, т.е. в первоначальном направлении, с двойной-тройной частотой вращения, что и требуется для активной генерации тока. Тем не менее, если электродвигатель будет переключен на рабочий режим, то ротор, вращаясь против направления вращения ведомого вала и колес, принудит их к попутному вращению с уменьшенной в два-три раза частотой оборотов и соответствующим повышением крутящего момента на ведущих колесах. Так как электродвигателю постоянного тока, а именно такие электродвигатели предусматриваются для электромобилей, безразлично направление вращения, достаточно переключить полюса, работа электромобильного вариатора в реверс-зоне не вызывает никаких дополнительных усложнений. Есть смысл устанавливать индивидуальный привод на каждое ведущее колесо. Во-первых, это уменьшает мощность каждого отдельного привода, то есть увеличивает его компактность, во-вторых, это дает возможность обойтись без дифференциала и раздаточной коробки, так как каждое колесо управляется как совместно, так и обособленно. При возвращении педали 43 в исходное нейтральное положение возвратная пружина 51 поворачивает управляющее кольцо 17, при этом ролики 15, идущие вдоль прямых пазов 13, одновременно перемещаются и по наклонным пазам 14, что ведет к смещению подвижного кольца 11 в сторону неподвижного кольца 8. Одновременно подвижное кольцо смещает в том же направлении по шлицевым валам сдвоенные несимметричные сателлиты 27 на всех сателлитных блоках. Конечным результатом будет совмещение зубчатого венца 9 неподвижного кольца и зубчатых венцов 34 сателлитов. При этом фрикционный внутренний обод 12 подвижного кольца остановится на опорных цилиндрических поясках 33 сателлитов, что обеспечит рабочий зазор зубчатых зацеплений на всех зубчатых венцах 34. В этом положении, когда ведомый вал не вращается при вращении ведущего, соотношение элементов зубчатых зацеплений соответствует нижеприведенному равенству dн
В зависимости от соотношения элементов формулы передаточное число может иметь положительное или отрицательное значение. Положительное значение передаточного числа означает, что ведущий вал-водило и ведомый вал вращаются в одном направлении. Как это сказывается на работе механизма при езде "накатом" с неотключенным двигателем, т.е. когда ведомый вал приводится во вращение колесами катящегося под уклон веломобиля? При езде "накатом" принудительное вращение ведомого вала колесами заставляет сателлиты вращаться в том же направлении, что приводит к принудительному вращению ведущего вала в противоположном направлении. Конечно, это вращение произойдет, если сателлиты контактируют с центральным колесом. Фактически, у транспортного вариатора обороты ДВС и ведущего вала сброшены, так как для инерционного пробега мощность ДВС не расходуется. Центробежная сила сателлитов уменьшается, что приводит к их разобщению с центральным колесом, и инерционный пробег обеспечивается. Для электромобильного вариатора такое положение вещей не подходит, так как электромобиль вынужден из соображений утилизации энергии проходить инерционный пробег в генераторном режиме электродвигателя. Выходом из положения является работа электромобильного вариатора в реверс-зоне. В этом случае обеспечивается постоянство направления вращения всех элементов передачи как в рабочем режиме электродвигателя, так и в режиме генератора. При достаточном запасе энергии инерционного движения в положении элементов вариатора, обеспечивающих передаточное число, равное двум-трем /при дальнейшем увеличении передаточного числа наступит самоторможение/, инерционное вращение зубчатого колеса ведомого вала приведет к противоположному вращению ротора электродвигателя, т.е. в первоначальном направлении, с двойной-тройной частотой вращения, что и требуется для активной генерации тока. Тем не менее, если электродвигатель будет переключен на рабочий режим, то ротор, вращаясь против направления вращения ведомого вала и колес, принудит их к попутному вращению с уменьшенной в два-три раза частотой оборотов и соответствующим повышением крутящего момента на ведущих колесах. Так как электродвигателю постоянного тока, а именно такие электродвигатели предусматриваются для электромобилей, безразлично направление вращения, достаточно переключить полюса, работа электромобильного вариатора в реверс-зоне не вызывает никаких дополнительных усложнений. Есть смысл устанавливать индивидуальный привод на каждое ведущее колесо. Во-первых, это уменьшает мощность каждого отдельного привода, то есть увеличивает его компактность, во-вторых, это дает возможность обойтись без дифференциала и раздаточной коробки, так как каждое колесо управляется как совместно, так и обособленно. При возвращении педали 43 в исходное нейтральное положение возвратная пружина 51 поворачивает управляющее кольцо 17, при этом ролики 15, идущие вдоль прямых пазов 13, одновременно перемещаются и по наклонным пазам 14, что ведет к смещению подвижного кольца 11 в сторону неподвижного кольца 8. Одновременно подвижное кольцо смещает в том же направлении по шлицевым валам сдвоенные несимметричные сателлиты 27 на всех сателлитных блоках. Конечным результатом будет совмещение зубчатого венца 9 неподвижного кольца и зубчатых венцов 34 сателлитов. При этом фрикционный внутренний обод 12 подвижного кольца остановится на опорных цилиндрических поясках 33 сателлитов, что обеспечит рабочий зазор зубчатых зацеплений на всех зубчатых венцах 34. В этом положении, когда ведомый вал не вращается при вращении ведущего, соотношение элементов зубчатых зацеплений соответствует нижеприведенному равенству dн dс d''ш = dэ dшс d'ш. Согласно формуле передаточного числа по условию этого равенства передаточное число становится бесконечно большим, что означает, что вращение вала электродвигателя, соединенного с валом-водилом вариатора, вращения ведомого вала и колеса не вызывает. После плавного пуска электродвигателя поворотом педали 43 педаль перемещается поступательно вместе со штангой 46, что приводит к повороту управляющего кольца 17 и плавному отводу подвижного кольца центрального колеса от неподвижного. При этом пружины 36 выжимают сателлиты 27 в новое продольное положение, когда конические поверхности 28, 29 уменьшают величины своих работающих диаметров. Коническая поверхность 29 контактирует с фрикционной фаской 10 неподвижного кольца 8, а коническая поверхность 28 контактирует с рабочей поверхностью фрикционного рабочего обода 12. На элементах 10, 12 сдвоенные несимметричные сателлиты самоориентируются перемещаясь на шлицах шлицевых валов 24. При полностью выжатой педали подвижное кольцо полностью отходит от неподвижного, и зубчатый венец 9 входит в зацепление с зубчатыми венцами 30 "минимальной редукции", когда ведомый вал развивает максимальные обороты. Далее можно манипулировать скоростью путем поворота педали, то есть электродвигателем. Электродвигатели имеют значительную частоту оборотов, превышающую частоту ДВС, поэтому на сателлитных блоках возникают значительные центробежные силы, которые обеспечивают фрикционный натяг. Согласно формуле передаточного числа чем больше уменьшаются работающие диаметры сателлитов, тем больше уменьшается АБСОЛЮТНОЕ значение передаточного числа и тем больше развивается частота оборотов ведомого вала 41. Когда с уменьшится настолько, что произведение dэ dшс d'ш вдвое превысит произведение dн dс d''ш, передаточное число приобретет значение -1, то есть ведущий вал-водило и ведомый вал будут вращаться с одинаковой частотой. Впрочем, практически это нерационально, так как мощность электромобильного двигателя ограничена, во всяком случае на сегодняшней стадии, массоемкостью аккумуляторных батарей. Поэтому максимальная частота оборотов ведомого вала ограничивается диаметром зубчатых венцов 30. При хорошей дороге положение зацепления этих зубчатых венцов является основным, а так как они не допустят проскальзывания, можно частично уменьшать и увеличивать скорость электродвигателем. Так же защищают от проскальзывания зубчатые венцы "максимальной редукции", которые используются при медленном движении в трудных дорожных условиях. Необходимость зубчатых венцов "нулевой скорости" объясняется условиями безопасности. Если на диаметре зубчатого венца "нулевой скорости" оставить фрикционное контактирование, то из-за возможного проскальзывания может произойти самовольное движение электромобиля. При движении электромобиля с установленной раствором колец центрального колеса скоростью водителю необходимо держать педаль в определенном положении. Пружинный возврат в исходное положение управляющего кольца требует тем большего усилия нажима на педаль, чем больше скорость, так как при растяжении пружина прогрессивно увеличивает реактивное сопротивление. Чтобы уменьшить утомляемость водителя в электромобильном вариаторе применено устройство, которое позволяет сохранить усилие нажатия на педаль постоянным. Трос 49 возвратной пружины 51 огибает канавку дуги сектора 50 и крепится на дальнем его конце вместе с возвратной пружиной. В процессе перемещения педали и поворота управляющего кольца 17 трос вытягивается и поворачивается по канавке сектора. При этом возвратная пружина, с одной стороны, растягиваясь, увеличивает усилие с "P1" до "P2", с другой стороны, сектор, поворачиваясь вокруг оси, уменьшает плечо усилия с "a1" до "a2". Если выдержать профиль дуги сектора определенным образом, то при его повороте будет выдерживаться равенство M = P1a1 = P2a2 = const. Естественно, что в таком случае усилие возврата педали в любом ее положении будет постоянным. Применение электромобильного вариатора дает возможность использовать на электромобилях маломощные электродвигатели и тем не менее обеспечивать хорошую дорожную проходимость, так как, например, взятие крутых подъемов и т. п. определяется только способностью электромобильного вариатора бесконечно многократно снижать частоту оборотов выходного вала и соответственно повышать на нем крутящий момент. Электромобиль, снабженный электромобильным вариатором, обходится без раздаточной коробки, дифференциала, механизма сцепления и даже без системы тормозов. Обходясь единственной педалью, водитель полностью управляет электромобилем и при необходимости осуществляет как плавное, так и экстренное торможение. Для плавного торможения водитель плавно освобождает педаль. При этом кольца центрального колеса сходятся до положения, когда торец фрикционного внутреннего обода 12 подвижного кольца 11, сдвинув сателлитные блоки, введет в зацепление с внутренним зубчатым венцом 9 зубчатые венцы 34. При этом плавно падает до нуля скорость электромобиля. При быстром сбросе ноги с педали скорость схождения колец центрального колеса определяется только быстротой срабатывания пружины. Формула передаточного числа электромобильного вариатора включает в себя соотношения работающих диаметров сателлитов с, диаметр зубчатого обода неподвижного кольца dэ, который соответствует диаметру фрикционного обода подвижного кольца, диаметров промежуточных блоков шестерен d'ш и d''ш, диаметры зубчатых венцов-шестерен сателлитных блоков dшс и диаметр зубчатого колеса ведомого вала dн. Для электромобильного вариатора при его минимальных габаритах и мощности электродвигателя 6 - 8 кВт, при частоте оборотов нормального режима 6000 об/мин элементы его планетарной передачи могут иметь, например, нижеследующие значения: dэ - 110 мм, 110 зубьев; dco - 40 мм, 40 зубьев; dшс - 30 мм, 20 зубьев; d''ш - 33 мм, 22 зуба; d'ш - 28 мм, 14 зубьев; dн - 70 мм, 35 зубьев; dсн - венец минимальной редукции - 30 мм, 30 зубьев; dcх - венец максимальной редукции - 39 мм, 39 зубьев. Передаточное число этого электромобильного вариатора, обеспечивающее максимальную скорость электромобиля, равно i = 703033/69300 - 1103028 = -3. Увеличивать абсолютное значение передаточного числа нет необходимости, так как при частоте оборотов электродвигателя 6000 об/мин ведущие колеса электромобиля и при этом передаточном числе будут вращаться со скоростью 2000 об/мин, то есть при диаметре ведущих колес электромобиля 0,4 м электромобиль разовьет на хорошей дороге скорость 150 км/ч, что, учитывая его малую мощность, неплохо. В то же время передаточное число электромобильного вариатора в положении колец его центрального колеса на управляющих цилиндрических поясках сателлитов и на их зубчатых венцах "максимальной редукции" равно i = 703933/90090-1103028 = -39. Такое передаточное число обеспечит на ведущих колесах окружное усилие в 130 кгс, что позволит электромобилю беспрепятственно двигаться на трудных участках дороги. Итак, электромобильный вариатор повышает экологичность, удобство управления, безопасность движения и обеспечивает работу электродвигателя в режиме генератора.
dс d''ш = dэ dшс d'ш. Согласно формуле передаточного числа по условию этого равенства передаточное число становится бесконечно большим, что означает, что вращение вала электродвигателя, соединенного с валом-водилом вариатора, вращения ведомого вала и колеса не вызывает. После плавного пуска электродвигателя поворотом педали 43 педаль перемещается поступательно вместе со штангой 46, что приводит к повороту управляющего кольца 17 и плавному отводу подвижного кольца центрального колеса от неподвижного. При этом пружины 36 выжимают сателлиты 27 в новое продольное положение, когда конические поверхности 28, 29 уменьшают величины своих работающих диаметров. Коническая поверхность 29 контактирует с фрикционной фаской 10 неподвижного кольца 8, а коническая поверхность 28 контактирует с рабочей поверхностью фрикционного рабочего обода 12. На элементах 10, 12 сдвоенные несимметричные сателлиты самоориентируются перемещаясь на шлицах шлицевых валов 24. При полностью выжатой педали подвижное кольцо полностью отходит от неподвижного, и зубчатый венец 9 входит в зацепление с зубчатыми венцами 30 "минимальной редукции", когда ведомый вал развивает максимальные обороты. Далее можно манипулировать скоростью путем поворота педали, то есть электродвигателем. Электродвигатели имеют значительную частоту оборотов, превышающую частоту ДВС, поэтому на сателлитных блоках возникают значительные центробежные силы, которые обеспечивают фрикционный натяг. Согласно формуле передаточного числа чем больше уменьшаются работающие диаметры сателлитов, тем больше уменьшается АБСОЛЮТНОЕ значение передаточного числа и тем больше развивается частота оборотов ведомого вала 41. Когда с уменьшится настолько, что произведение dэ dшс d'ш вдвое превысит произведение dн dс d''ш, передаточное число приобретет значение -1, то есть ведущий вал-водило и ведомый вал будут вращаться с одинаковой частотой. Впрочем, практически это нерационально, так как мощность электромобильного двигателя ограничена, во всяком случае на сегодняшней стадии, массоемкостью аккумуляторных батарей. Поэтому максимальная частота оборотов ведомого вала ограничивается диаметром зубчатых венцов 30. При хорошей дороге положение зацепления этих зубчатых венцов является основным, а так как они не допустят проскальзывания, можно частично уменьшать и увеличивать скорость электродвигателем. Так же защищают от проскальзывания зубчатые венцы "максимальной редукции", которые используются при медленном движении в трудных дорожных условиях. Необходимость зубчатых венцов "нулевой скорости" объясняется условиями безопасности. Если на диаметре зубчатого венца "нулевой скорости" оставить фрикционное контактирование, то из-за возможного проскальзывания может произойти самовольное движение электромобиля. При движении электромобиля с установленной раствором колец центрального колеса скоростью водителю необходимо держать педаль в определенном положении. Пружинный возврат в исходное положение управляющего кольца требует тем большего усилия нажима на педаль, чем больше скорость, так как при растяжении пружина прогрессивно увеличивает реактивное сопротивление. Чтобы уменьшить утомляемость водителя в электромобильном вариаторе применено устройство, которое позволяет сохранить усилие нажатия на педаль постоянным. Трос 49 возвратной пружины 51 огибает канавку дуги сектора 50 и крепится на дальнем его конце вместе с возвратной пружиной. В процессе перемещения педали и поворота управляющего кольца 17 трос вытягивается и поворачивается по канавке сектора. При этом возвратная пружина, с одной стороны, растягиваясь, увеличивает усилие с "P1" до "P2", с другой стороны, сектор, поворачиваясь вокруг оси, уменьшает плечо усилия с "a1" до "a2". Если выдержать профиль дуги сектора определенным образом, то при его повороте будет выдерживаться равенство M = P1a1 = P2a2 = const. Естественно, что в таком случае усилие возврата педали в любом ее положении будет постоянным. Применение электромобильного вариатора дает возможность использовать на электромобилях маломощные электродвигатели и тем не менее обеспечивать хорошую дорожную проходимость, так как, например, взятие крутых подъемов и т. п. определяется только способностью электромобильного вариатора бесконечно многократно снижать частоту оборотов выходного вала и соответственно повышать на нем крутящий момент. Электромобиль, снабженный электромобильным вариатором, обходится без раздаточной коробки, дифференциала, механизма сцепления и даже без системы тормозов. Обходясь единственной педалью, водитель полностью управляет электромобилем и при необходимости осуществляет как плавное, так и экстренное торможение. Для плавного торможения водитель плавно освобождает педаль. При этом кольца центрального колеса сходятся до положения, когда торец фрикционного внутреннего обода 12 подвижного кольца 11, сдвинув сателлитные блоки, введет в зацепление с внутренним зубчатым венцом 9 зубчатые венцы 34. При этом плавно падает до нуля скорость электромобиля. При быстром сбросе ноги с педали скорость схождения колец центрального колеса определяется только быстротой срабатывания пружины. Формула передаточного числа электромобильного вариатора включает в себя соотношения работающих диаметров сателлитов с, диаметр зубчатого обода неподвижного кольца dэ, который соответствует диаметру фрикционного обода подвижного кольца, диаметров промежуточных блоков шестерен d'ш и d''ш, диаметры зубчатых венцов-шестерен сателлитных блоков dшс и диаметр зубчатого колеса ведомого вала dн. Для электромобильного вариатора при его минимальных габаритах и мощности электродвигателя 6 - 8 кВт, при частоте оборотов нормального режима 6000 об/мин элементы его планетарной передачи могут иметь, например, нижеследующие значения: dэ - 110 мм, 110 зубьев; dco - 40 мм, 40 зубьев; dшс - 30 мм, 20 зубьев; d''ш - 33 мм, 22 зуба; d'ш - 28 мм, 14 зубьев; dн - 70 мм, 35 зубьев; dсн - венец минимальной редукции - 30 мм, 30 зубьев; dcх - венец максимальной редукции - 39 мм, 39 зубьев. Передаточное число этого электромобильного вариатора, обеспечивающее максимальную скорость электромобиля, равно i = 703033/69300 - 1103028 = -3. Увеличивать абсолютное значение передаточного числа нет необходимости, так как при частоте оборотов электродвигателя 6000 об/мин ведущие колеса электромобиля и при этом передаточном числе будут вращаться со скоростью 2000 об/мин, то есть при диаметре ведущих колес электромобиля 0,4 м электромобиль разовьет на хорошей дороге скорость 150 км/ч, что, учитывая его малую мощность, неплохо. В то же время передаточное число электромобильного вариатора в положении колец его центрального колеса на управляющих цилиндрических поясках сателлитов и на их зубчатых венцах "максимальной редукции" равно i = 703933/90090-1103028 = -39. Такое передаточное число обеспечит на ведущих колесах окружное усилие в 130 кгс, что позволит электромобилю беспрепятственно двигаться на трудных участках дороги. Итак, электромобильный вариатор повышает экологичность, удобство управления, безопасность движения и обеспечивает работу электродвигателя в режиме генератора.Формула изобретения
1. Электромобильный вариатор, содержащий корпус, ведущий вал-водило, ведомый вал с зубчатым колесом, сателлитные блоки в виде валиков с конической поверхностью, расположенных на радиально подпружиненных подвесках параллельно оси валов и снабженных зубчатыми венцами, центральное колесо и механизм его осевого перемещения с тросом и возвратной пружиной, отличающийся тем, что ведущий вал-водило и ведомый вал имеют противоположное направление вращения, сателлитные блоки содержат подпружиненные в осевом направлении сдвоенные несимметричные сателлиты с поверхностями противоположной конусности и зубчатыми венцами "нулевой скорости", "максимальной редукции" и "минимальной редукции", на стороне меньшей конусности размещены цилиндрические пояски, а центральное колесо выполнено в виде неподвижного кольца с внутренним зубчатым венцом и подвижного кольца с фрикционным внутренним ободом, перемещаемого посредством механизма осевого перемещения. 2. Вариатор по п.1, отличающийся тем, что центральное колесо дополнительно содержит неподвижное кольцо с внутренним зубчатым венцом и подвижное кольцо, при этом неподвижные кольца расположены по краям корпуса, а подвижные кольца имеют каждое по два или более обода с внутренними поверхностями фрикционного зацепления, а каждый сателлитный блок дополнительно содержит сдвоенный несимметричный сателлит и один или несколько сдвоенных симметричных сателлитов. 3. Вариатор по п.1, отличающийся тем, что трос возвратной пружины соединен с механизмом осевого перемещения центрального колеса через поворотный сектор.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3, Рисунок 4, Рисунок 5, Рисунок 6, Рисунок 7www.findpatent.ru
Идеальный вариатор
Пессимисты утверждают, что нет ничего идеального, давайте усомнимся и попробуем создать идеальную вещь. Конечно, вариатор штука специфическая, и интересна только узкому кругу специалистов, но здесь я предлагаю всем братьям технарям обратить внимание на то, как следует решать задачи, которые, на первый взгляд, кажутся принципиально не решаемыми. Идеальное, всегда скрывается именно за принципиальной нерешаемостью, самое интересное всегда там.
Достичь цели можно только в том случае, если она ясна. То есть, мы, прежде всего, должны понимать, что именно мы хотим. Поэтому сначала давайте представим не сам вариатор, а те свойства, которыми он должен обладать.
Итак, наш идеальный вариатор не должен иметь недостатков всех ныне существующих вариаторов. Соответственно, он должен передавать крутящий момент любой величины, должен иметь нейтралку и менять передаточное число от бесконечно большого до прямой передачи. Он должен иметь возможность обратного вращения, то есть иметь задний ход и всё это должно быть реализовано простой конструкцией без лишних деталей, чтоб ломаться было нечему. Поэтому в конструкции не должно быть ничего двигающегося туда – сюда, никаких синхронизаторов и фрикционных механизмов. Управление вариатором должно быть предельно простым и должно легко осуществляться, как автоматикой, так и компьютером и если надо то и вручную. Вот теперь, когда цель ясна, можно заняться и конструкцией.
Передачу больших крутящих моментов могут осуществлять только шестерни, поэтому мы сразу отказываемся от всех роликов, цепей и ремней. То есть, у нас должны быть только неподвижные шестерни всегда находящиеся в зацеплении. Если бы такая задача решалась бы при обычных подходах, она бы давно была бы решена, следовательно, в конструкции всех вариаторов есть нечто общее, что не позволяет добиться идеального решения. В конструкции всех вариаторов, да и всех ступенчатых коробок, есть один общий момент, у них у всех есть только один путь передачи крутящего момента. Место передачи может меняться, но путь всегда один. В коробке не может быть включено сразу две передачи, вариаторы, те вообще по конструкции имеют всегда один ролик, цепь или ремень. Значит, нам следует искать решение в конструкции способной передавать крутящий момент разными путями.
Самое первое, что приходит в голову - это обычный дифференциал. Он распределяет крутящий момент по двум полуосям или по приводам у переднеприводных машин. Возможность, для крутящего момента, предаваться не по одному пути приводит к тому, что машины буксуют, кода одно из колёс имеет низкий коэффициент сцепления с дорогой. То есть, крутящий момент, как и электрический ток, всегда уходит туда, где меньше сопротивление. Следовательно, если мы будем менять нагрузку на одном из путей передачи крутящего момента, на втором пути будет меняться скорость вращения, или, что то же самое, передаточное число. Нагружать одну полуось можно не только фрикционным механизмом, но и генератором, а ток с него, тут же отдавать на электродвигатель, вращающий вторую полуось. В итоге, крутящий момент будет передаваться частично механическим методом, частично электрическим. При этом передаточное число будет зависеть от нагрузки на машину и того, какое сопротивление мы установим в цепи между генератором и электродвигателем.
Недостатком дифференциала является разнонаправленность приёма и передачи крутящего момента, что требует специфического и сложного изготовления шестерней. Наличие у таких шестерней большей поверхности трения уменьшает общий КПД всего механизма. Поэтому более изящное решение видится на основе планетарного механизма. Этот вид механизмов повсеместно применяется в редукторах и для того, чтобы получить вариатор нам достаточно убрать внешнюю неподвижную шестерню. В этом случае нам потребуется для изменения передаточного числа нагружать планетарные шестерни, но так как это довольно проблематично, то следует за водилом, на его валу добавить свободно вращающуюся шестерню, которую будут вращать добавочные планетарные шестерни установленные на тех же осях. Вот её уже можно использовать как привод генератора и теперь рассмотрим нижеприведённый рисунок.

1. Вал с которого приходит крутящий момент.2. Солнечная шестерня.3. Водило.4. Планетарные шестерни.5. Добавочные планетарные шестерни.6. Вал водила.7. Шестерня генератора.8. Якорь генератра.9. Статор генератора.10. Электродвигатель.
Если полностью отключить электродвигатель от генератора, то крутящий момент полностью уйдёт на вращение планетарных шестерней и якоря неработающего генератора, что соответствует нейтральной передаче. По мере уменьшения сопротивления в цепи между генератором и электродвигателем, генератор начнёт оказывать сопротивление вращению планетарных шестерней в своих осях, и солнечная шестерня начнёт вращать водило. Ток, снимаемый с генератора, через электродвигатель также будет способствовать вращению водила.
Когда нагрузка генератора прекратит вращение планетарных шестерней в своих осях, мы получим прямую передачу. Обратное вращение мы получим при полностью отключенном генераторе и когда на электродвигатель подадим обратный ток, соответственно электродвигатель должен быть реверсивным. При этом понятно, что задний ход будет чисто электрическим, но, по крайней мере, механика не будет препятствовать этому без всяких механических переключений, просто планетарным шестерням придётся вращаться немного быстрее.
В такой системе не будет прямой зависимости между нагрузкой генератора и передаточным числом. Передаточное число ещё будет зависеть от нагрузки создаваемой конечным потребителем, обычно это колёса автомобиля. Например, при одних и тех же оборотах двигателя и неизменной нагрузке генератора, если машина с горизонтальной дороги пойдёт в гору, то такой вариатор тут же сам начнёт менять передаточное число в сторону увеличения. Это значит, что такая система передаточное число всегда автоматически устанавливает таким, чтобы нагрузки с обеих сторон были одинаковыми, почему такая система и называется системой равновесных оборотов. При этом нагрузкой на автомобиль, через такой вариатор двигатель не заглушишь, он может работать с передаточными числами как у часового механизма и, соответственно, будет создавать тягу подобно лебёдке. Так будет происходить потому, что при нагрузках превышающих сопротивление генератора планетарные шестерни начнут проворачиваться и скорость вращения водила начнёт уменьшаться.
Сочетание механической и электрической частей в одном агрегате даёт много полезных возможностей. Сейчас инженерная мысль пытается совместить обычный двигатель с электродвигателем, что порождает массу проблем и сильно усложняет общую конструкцию двигателя. Рассмотренный здесь вариатор позволяет не мудрить понапрасну с двигателем и перенести электротягу в область трансмиссии. Наличие в вариаторе своего генератора позволяет использовать его как тормоз. Для этого достаточно переключить его с электродвигателя на аккумулятор. В этом случае генератор создаст максимальное сопротивление вращению планетарных шестерней и низкие обороты двигателя через водило начнут тормозить колёса. На больших скоростях торможение двигателем более безопасно, да и аккумулятор заодно подзарядится.
В заключении мне, как и в статье «Идеальный движитель» остаётся только сказать, кто может сделать - сделайте, идея перед вами.
www.filosofia-itogi.ru